Гарантия на автомобили Киа
Общие положения
Kia не просто продает автомобили. Мы хотим, чтобы наши клиенты наслаждались ими долгие годы.Мы используем новейшие инженерные и технические ноу-хау для проектирования и сборки автомобилей, и мы думаем, что вы оцените результат каждый раз, садясь за руль. 5-летняя гарантия распространяется на новые автомобили Kia, купленные у Дилера Kia в РФ, зарегистрированные и используемые на территории РФ.
Подробные условия гарантии указаны в Сервисной книжке и договоре купли-продажи автомобиля при покупке автомобиля у Дилера Kia в РФ.
Сервисная Книжка и условия гарантии
Все положения и условия гарантии, изложенные в Сервисной книжке, которую владелец получил при приобретении автомобиля Kia у Дилера, являются приоритетными. При наличии в Сервисной книжке отдельных положений и условий, ссылающиеся на официальный сайт Kia – приоритетными являются условия, изложенные на официальном сайте Kia.
Дилер
Решение об отнесении или нет каждого конкретного случая к гарантийному принимается Дилерами самостоятельно без согласования с ООО «Киа Россия и СНГ». Решение Дилер Kia принимает в соответствии с документами, регулирующими его деятельность, а также на основе данных по условиям и режиму эксплуатации каждого конкретного автомобиля.Что покрывается гарантией
Дилер Kia готов выполнить гарантийный ремонт, используя оригинальные детали, чтобы устранить проблему, покрываемую гарантией, без взимания дополнительной платы. Гарантия на детали, отремонтированные или установленные взамен неисправных, предоставляется до конца срока гарантии на автомобиль, за исключением элементов, на которые установлен гарантийный срок меньшей продолжительности в соответствии с Сервисной книжкой. Основная гарантия На основные элементы автомобилей Kia, эксплуатируемых на территории России, кроме специфических и специально оговоренных, гарантийный период с момента продажи первому Владельцу составляет 60 месяцев или 150 000 км пробега, в зависимости от того, что наступит раньше.
Аккумуляторная батарея
На оригинальную аккумуляторную батарею (установленную Изготовителем) гарантийный период составляет 6 месяцев с даты продажи автомобиля без ограничения пробега. На батарею системы «ЭРА-ГЛОНАСС» (установленную Изготовителем) гарантийный период составляет 36 месяцев с даты продажи автомобиля без ограничения пробега.Автомобильные шины
Гарантия на автомобильные шины, первоначально установленные на автомобиль, предоставляется их Изготовителем. В случае возникновения претензии по автомобильным шинам обратитесь к Вашему Дилеру Kia, который предоставит
Вам необходимую информацию для предъявления претензии Изготовителю автомобильных шин. Дополнительное оборудование Гарантия на дополнительное оборудование, приобретённое у дилера, предоставляется его Изготовителем.
В случае возникновения претензий, обратитесь к Вашему Дилеру Kia, который обеспечит Вам необходимую поддержку
и обслуживание в соответствии с гарантийной политикой Изготовителя дополнительного оборудования.
В случае возникновения претензии по автомобильным шинам обратитесь к Вашему Дилеру Kia, который предоставит
Вам необходимую информацию для предъявления претензии Изготовителю автомобильных шин. Дополнительное оборудование Гарантия на дополнительное оборудование, приобретённое у дилера, предоставляется его Изготовителем.
В случае возникновения претензий, обратитесь к Вашему Дилеру Kia, который обеспечит Вам необходимую поддержку
и обслуживание в соответствии с гарантийной политикой Изготовителя дополнительного оборудования.Программное обеспечение
Из-за сложности компьютерного программного обеспечения и систем глобального позиционирования Изготовитель не предоставляет гарантии того, что функционирование программного обеспечения будет непрерывным или свободным от ошибок, или того, что информация, предоставляемая программным обеспечением, не будет содержать ошибок, включая актуальное местонахождение Пользователя, информацию о дорожной сети, ее наличии и состоянии или наличии населенных пунктов.
Аудио / аудио-видео навигационная система
Гарантийный срок на аудио / аудио-видео навигационную систему, установленную на автомобиль, определена сроком 36 месяцев или 60 000 км пробега, в зависимости от того, что наступит ранее, отсчитывая от даты продажи автомобиля.Запасные части
Гарантия на оригинальные запасные части Kia, заменённые в ходе коммерческого ремонта, составляет 12 месяцев или 20 000 км пробега, в зависимости от того, что наступит ранее, отсчитывая от даты закрытия заказ-наряда.Симметричный полный привод Symetrical AWD
Система полного привода VTD*1: Спортивная версия полного привода с электронным управлением, улучшающая характеристики поворачиваемости. Компактная система полного привода включает в себя межосевой планетарный дифференциал и многодисковую гидравлическую
муфту блокировки *2 с электронным управлением. Распределение крутящего момента между передними и задними колесами в соотношении 45:55 непрерывно корректируется блокировкой дифференциала с помощью многодисковой муфты. Распределение крутящего момента контролируется автоматически, с учетом состояния дорожного покрытия. Это обеспечивает великолепную устойчивость, а за счет распределения крутящего момента с акцентом на задние колеса улучшаются характеристики поворачиваемости.
Распределение крутящего момента между передними и задними колесами в соотношении 45:55 непрерывно корректируется блокировкой дифференциала с помощью многодисковой муфты. Распределение крутящего момента контролируется автоматически, с учетом состояния дорожного покрытия. Это обеспечивает великолепную устойчивость, а за счет распределения крутящего момента с акцентом на задние колеса улучшаются характеристики поворачиваемости.
Актуальные модели (российская спецификация)
Subaru WRX c трансмиссией Lineartronic.
Ранее устанавливалась на автомобили: Subaru Legacy GT 2010‑2013, Forester S‑Edition 2011‑2013, Outback 3.6 2010‑2014, Tribeca,
WRX STI с автоматической трансмиссией 2011‑2012

Оригинальная многодисковая муфта передачи крутящего момента Subaru регулирует распределение крутящего момента между передними и задними колесами в режиме реального времени в соответствии с условиями движения. Алгоритм управления заложен в электронном блоке управления трансмиссией и учитывает скорости вращения передних и задних колес, текущий крутящий момент на коленчатом валу двигателя, текущее передаточное отношение в трансмиссии, угол поворота рулевого колеса и т.д. и при помощи гидроблока сжимает диски муфты с необходимым усилием. В идеальных условиях система распределяет крутящий момент между передними и задними колесами в соотношении 60:40. В зависимости от обстоятельств, таких, как буксование, крутой поворот и др. перераспределение крутящего момента между осями меняется. Адаптация алгоритма управления под текущие условия движения обеспечивает превосходную управляемость в любой дорожной ситуации, независимо от уровня подготовки водителя. Многодисковая муфта располагается в корпусе силового агрегата, является его составной частью и использует ту же рабочую жидкость, что и другие элементы автоматической трансмиссии, что обусловливает ее лучшее охлаждение, нежели при обособленном расположении, как у большинства производителей, и, следовательно большую долговечность.
Актуальные модели (российская спецификация)
На российском рынке Subaru Outback, Subaru Forester*, Subaru XV.
Актуальные модели (российская спецификация)
Subaru WRX и Subaru Forester — с механической трансмиссией.
Система полного привода, ориентированная на обеспечение максимальных ходовых характеристик, для серьезных спортивных состязаний. Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения
использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые
характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует
наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной
ситуацией.
Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения
использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые
характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует
наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной
ситуацией.
Актуальные модели (российская спецификация)
Subaru WRX STI с механической трансмиссией.
Самый полный привод — ДРАЙВ
Этот материал мы задумывали как типичный «ликбез» из серии «Всё, что вы хотели знать о полном приводе, но не знали, у кого спросить».
Зачем легковому автомобилю полный привод? Сейчас, в начале XXI века, этот вопрос кажется риторическим. Конечно же, для лучшей реализации тяговых сил двигателя. Для того чтобы колёса при разгоне на скользком покрытии как можно меньше буксовали вхолостую. Четыре ведущих колеса лучше, чем два! Но человечество долго постигало эту азбучную истину. Спросите любого автознатока — и он вам ответит, что эра полного привода на массовых легковых автомобилях началась только в 1980-м с появлением Audi Quattro. Назовёт он и редких предшественников — например, английский суперкар Jensen FF 1966 года и Subaru Leone 4WD 1972 года. Впрочем, настоящий знаток тут же оговорится: первые полноприводные автомобили Subaru не имели постоянного полного привода — он был подключаемым. А это, как говорят в Одессе, две большие разницы.
Впрочем, настоящий знаток тут же оговорится: первые полноприводные автомобили Subaru не имели постоянного полного привода — он был подключаемым. А это, как говорят в Одессе, две большие разницы.
Паллиатив
Подключаемый привод на одну из пар колёс — решение на легковых автомобилях паллиативное. Такую трансмиссию в англоязычном мире часто называют Part-Time 4WD, «временный полный привод», и пришла она из мира внедорожников и грузовой техники повышенной проходимости. Такой автомобиль, у которого одна из осей постоянно ведущая, а другая жёстко подключается в случае необходимости, способен проявить свои полноприводные качества только на время преодоления бездорожья. А для движения по дорогам с твёрдым покрытием жёсткий полный привод приходится отключать. Почему? Причина — в так называемой циркуляции мощности. Ведь в повороте передние колёса проходят больший путь, двигаясь по дугам большего радиуса, а значит, и вращаются быстрее задних. Причём чем круче поворот, тем разница больше. И на автомобилях с таким типом привода тяга на передних колёсах падает, а на задних — наоборот, растёт. В некоторых случаях тяговый момент может смениться тормозным, то есть передние колёса будут увеличивать сопротивление движению автомобиля. Когда под колёсами грязь или снег, в этом нет ничего страшного — разве что автомобиль станет хуже слушаться руля и пойдёт наружу «плугом» с вывернутыми колёсами.
И на автомобилях с таким типом привода тяга на передних колёсах падает, а на задних — наоборот, растёт. В некоторых случаях тяговый момент может смениться тормозным, то есть передние колёса будут увеличивать сопротивление движению автомобиля. Когда под колёсами грязь или снег, в этом нет ничего страшного — разве что автомобиль станет хуже слушаться руля и пойдёт наружу «плугом» с вывернутыми колёсами.
На этой схеме хорошо видно, что при движении в повороте все колёса катятся по своим траекториям и вынуждены вращаться с разными угловыми скоростями. Поэтому для постоянного полного привода нужны три дифференциала: два межколёсных и один межосевой.
Тем не менее блокированный полный привод на легковых дорожных автомобилях применяли. Правда, это были скорее легковушки повышенной проходимости. Например, в СССР ещё в 1938 году небольшими партиями начали выпускать ГАЗ-61 — полноприводную «эмку» с шестицилиндровым мотором и с подключаемым передним мостом. После войны делали и «внедорожный» вариант «Победы», ГАЗ-М72, и «Москвич»-410 с аналогичной трансмиссией.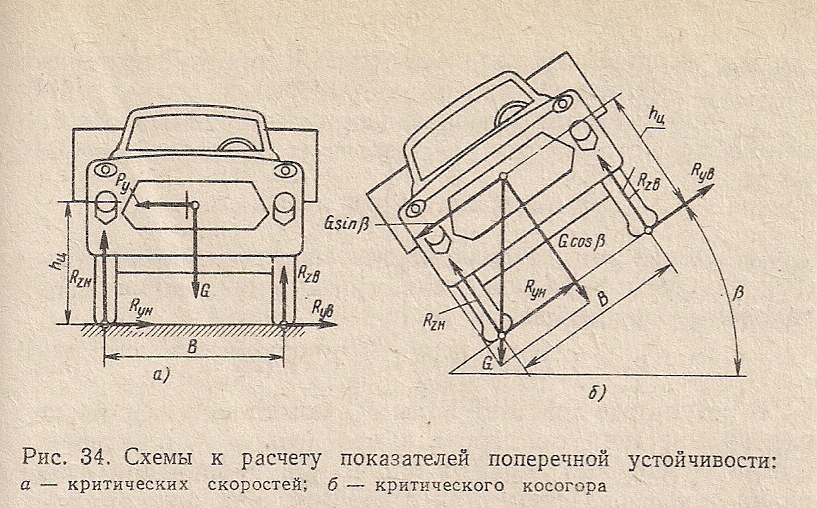 .. Да и Subaru Leone 4WD 1972 года, кстати, тоже делали для преодоления внедорожья — клиренс у машин с подключаемым задним мостом был выше, чем у обычных переднеприводных Subaru.
.. Да и Subaru Leone 4WD 1972 года, кстати, тоже делали для преодоления внедорожья — клиренс у машин с подключаемым задним мостом был выше, чем у обычных переднеприводных Subaru.
Subaru Leone 4WD Station Wagon (1972–1979) — полноприводная версия переднеприводной машины с подключаемым вручную приводом на задние колёса. Двигатель — объёмом 1,4 л (72 л.с.) или 1,6 л (80 л.с.). Кроме универсала, полным приводом оснащались седан и пикап. До 1989 года на всех полноприводных Subaru привод на задние колёса подключался или вручную (на машинах с механическими коробками), или автоматически — многодисковой фрикционной муфтой (на машинах с «автоматом»).
Итак, на дорогах с твёрдым покрытием, где легковые автомобили проводят большую часть времени, подключаемый привод бесполезен — он лишь утяжеляет автомобиль. Ведь всё это время машине приходится «возить с собой» раздаточную коробку, в которой происходит отбор мощности к «временно ведущей» второй оси, ещё один карданный вал, главную передачу второго моста. ..
..
Меж тем превратить «временный» полный привод в постоянный, Full-Time 4WD, очень просто. Нужно лишь добавить в раздаточную коробку межосевой дифференциал.
Постоянный полный
Зачем нужен межосевой дифференциал? Два межколёсных дифференциала, передний и задний, позволяют каждой паре колёс в поворотах вращаться с разными скоростями. А межосевой выполняет эту работу для обоих ведущих мостов. Поэтому автомобиль с тремя дифференциалами легко может двигаться с постоянным полным приводом по любым дорогам!
Элементарно? Меж тем до начала 80-х годов считалось, что постоянный полный привод дорожным автомобилям не нужен. Мол, к чему двигателю на сухом асфальте постоянно вращать вторую пару колёс и соответствующие детали трансмиссии — это и шум, и повышенный расход топлива… И лишь после появления Audi Quattro общественное мнение стало меняться в сторону постоянного полного привода. Ведь тяга двигателя при этом постоянно распределяется не на два, а на все четыре колеса, оставляя больший запас по сцеплению для восприятия боковых сил. И в повороте такой автомобиль оказывается намного более устойчивым при разгоне или при торможении двигателем.
И в повороте такой автомобиль оказывается намного более устойчивым при разгоне или при торможении двигателем.
«Рентген» Аudi 80 Quattro второй половины восьмидесятых годов. Хорошо видно, насколько проще и компактней схема quattro, чем трансмиссия Ferguson. Самоблокирующийся дифференциал Torsen используется Audi начиная с 1984 года. В отличие от дифференциала, блокируемого вискомуфтой, Torsen реагирует на изменение крутящего момента, реализуемого колёсами каждой из осей, повышает устойчивость при торможении и позволяет использовать АБС, так как блокируется только под тягой.
Кстати, первыми массовыми автомобилями с межосевыми дифференциалами в трансмиссии считаются Range Rover (1970) и наша «Нива» (1976). Но так как обе эти машины всё-таки принадлежат к внедорожному племени, то лавры первопроходца среди легковушек пожинает Audi Quattro.
А что же конструкторы гоночных автомобилей — неужели они не применили постоянный полный привод раньше? Мы знали, что попытки сделать полноприводные гоночные машины предпринимались и до эпохи Quattro. Например, первым послевоенным проектом Фердинанда Порше был полноприводный гоночный болид Cisitalia 360 среднемоторной компоновки с 12-цилиндровым полуторалитровым двигателем. Но доподлинно известно, что привод на передние колёса у этого чуда техники был отключаемым — гонщик должен был задействовать его только на прямых участках трассы, а перед поворотом вновь переходить на задний привод.
Например, первым послевоенным проектом Фердинанда Порше был полноприводный гоночный болид Cisitalia 360 среднемоторной компоновки с 12-цилиндровым полуторалитровым двигателем. Но доподлинно известно, что привод на передние колёса у этого чуда техники был отключаемым — гонщик должен был задействовать его только на прямых участках трассы, а перед поворотом вновь переходить на задний привод.
А были ли предшественники у Чизиталии? Оказалось, например, что тот же Фердинанд Порше ещё в 1900 году построил электромобиль с четырьмя ведущими мотор-колёсами. Но настоящий шок у автознатока вызовет гоночный автомобиль голландской фирмы Spyker образца 1902 года. В те дремучие времена, когда даже тормоза делали только на задних колёсах, у этого автомобиля был самый что ни на есть постоянный полный привод — с межосевым дифференциалом!
Голландскую фирму Spyker по выпуску конных экипажей основали в 1880 году братья Спяйкеры (по-фламандски фамилия пишется Spijker). В 1900 году братья выпустили первый автомобиль собственной конструкции, а спустя два года с помощью бельгийского конструктора Жозефа Лявиолета был разработан полноприводный гоночный Spyker 4WD (1902–1907) удивительно прогрессивной конструкции — с тремя дифференциалами! Тормозных механизмов было тоже три — два действовали на задние колёса, а ещё один тормоз был установлен на карданном валу к передним колёсам.
В 1900 году братья выпустили первый автомобиль собственной конструкции, а спустя два года с помощью бельгийского конструктора Жозефа Лявиолета был разработан полноприводный гоночный Spyker 4WD (1902–1907) удивительно прогрессивной конструкции — с тремя дифференциалами! Тормозных механизмов было тоже три — два действовали на задние колёса, а ещё один тормоз был установлен на карданном валу к передним колёсам.
Так что можно смело заявлять, что нынче схема Full-Time 4WD справляет своё столетие… Полноприводных Спайкеров было выпущено немного — они стоили сумасшедших денег и по разным причинам не смогли добиться успеха в гонках. Не намного удачнее оказались и другие полноприводные гоночные автомобили — Bugatti Tipo 53 и Miller FWD начала 30-х годов. Что касается Bugatti, то инициатива принадлежала фиатовскому инженеру Антонио Пикетто, который в 1930 году предложил Этторе Бугатти построить гоночную машину с колёсной формулой 4×4. И в 1932 году были сделаны три полноприводных Bugatti Tipo 53 — с мощными компрессорными трёхсотсильными моторами, с постоянным полным приводом и с тремя дифференциалами.
Полноприводный Bugatti Tipo 53 (1932–1935). Трансмиссия с тремя дифференциалами распределяла тягу 300-сильной компрессорной «восьмёрки» на все четыре колеса. Коробка передач, как обычно на Бугатти, стояла отдельно от двигателя, раздаточная коробка с межосевым дифференциалом составляла с ней одно целое. Приводные валы на передний и задний мосты проходили по левой стороне автомобиля, гонщик сидел справа. Несмотря на рекомендации конструктора переднеприводных машин того времени Альбера Грегуара, в приводе передних колёс Bugatti T53 были использованы не шарниры равных угловых скоростей типа Tracta, а обычные карданные сочленения. Кроме того, для Tipo 53 пришлось использовать нетипичную для Бугатти независимую переднюю подвеску на поперечной рессоре. Всё это привело к повышенным нагрузкам на руль — управлять автомобилем в поворотах было чрезвычайно тяжело, хотя скорости прохождения гравийных виражей были выше, чем у заднеприводных машин того времени. Всего было построено три Bugatti T53, которые выступали в разных гонках до 1935 года.
Интересно, что перед созданием полноприводного Bugatti итальянцы тщательно изучили приобретённый специально под разборку переднеприводный американский гоночный Miller. В свою очередь американец Гарри Миллер заинтересовался затеей Бугатти и тоже решил построить полноприводную версию своего автомобиля, заручившись спонсорством фирмы FWD (Four Wheel Drive — «Четыре ведущих колеса»), выпускавшей грузовики с колёсной формулой 4×4. Так появились полноприводные гоночные болиды Miller FWD.
Американский конструктор Гарри Миллер прославился в 20–30-х годах своими гоночными автомобилями для 500-мильных состязаний на треке в Индианаполисе, а его рядные «восьмёрки» с двумя верхними распредвалами брал за основу своих моторов Этторе Бугатти. Интересно, что Миллер строил машины как с передним, так и с задним приводом, а в 1932 году сделал несколько полноприводных шасси Miller FWD (на снимке) с тремя дифференциалами в трансмиссии. Один из полноприводных Миллеров лидировал в гонке Инди 500 1934 года, но из-за технических проблем финишировал девятым.
Именно с этими машинами связан любопытный эпизод: во время гонки на берлинском треке Avus в 1935 году полноприводный Miller шёл третьим, когда его рядная «восьмёрка» не выдержала и буквально взорвалась. При этом куски мотора лишь немного не долетели до трибуны, на которой среди прочих важных персон из национал-социалистической партии сидел сам Гитлер! Право, редкий случай, когда об отсутствии человеческих жертв стоит пожалеть. Прилетел бы осколок поршня в голову одного человека — и ход мировой истории был бы совсем другим…
Но Bugatti Т53 и Miller FWD не получили должной оценки — подвели «сырая» конструкция и постоянные поломки. Зато следующий эпизод в истории легковых машин с постоянным полным приводом оказался воистину судьбоносным.
Формула Фергюсона
Чтобы оценить всю важность того, что происходило в Англии на рубеже 50–60-х годов, вернёмся к теории. Межосевой дифференциал создан для того, чтобы «развязать» обе ведущие оси. Например, задние колёса бешено буксуют, а передние стоят на месте. И дифференциал этому никак не препятствует!
И дифференциал этому никак не препятствует!
Лекарство от этого недуга впервые придумали конструкторы внедорожников — это принудительная блокировка. В нужный момент водитель дёргает за рычаг, механизм намертво фиксирует шестерни межосевого дифференциала — и трансмиссия из дифференциальной, «свободной», становится жёстко замкнутой. Именно по этой схеме были сделаны и первые поколения автомобилей Range Rover, и наша «Нива», и множество других внедорожников. И, кстати, первые автомобили Audi Quattro тоже — в этих машинах до 1984 года водителю приходилось самостоятельно включать блокировку межосевого дифференциала.
Но это решение опять-таки паллиативное: блокировку на дорожной машине можно задействовать только на бездорожье. А на асфальте её нужно выключать. И если автомобиль внезапно попадёт на скользкий участок, колёса одной из осей при подаче тяги начнут буксовать раньше других.
А можно ли сделать так, чтобы дифференциал при пробуксовке блокировался сам, автоматически? Внедрение самоблокирующегося межосевого дифференциала связано с именем англичанина Тони Ролта, гонщика и конструктора. Он и его друг Фред Диксон, тоже гонщик и страстный любитель повозиться с автомобильными железками, ещё до войны открыли собственное бюро Rolt/Dixon Developments по подготовке гоночных автомобилей. После войны два друга увлеклись идеей постоянного полного привода. Построив экспериментальную полноприводную «тележку» под названием «Краб», Ролт и Диксон в 1950 году перешли под крыло Гарри Фергюсона, преуспевающего тракторного фабриканта. Так возникла фирма Harry Ferguson Research.
Он и его друг Фред Диксон, тоже гонщик и страстный любитель повозиться с автомобильными железками, ещё до войны открыли собственное бюро Rolt/Dixon Developments по подготовке гоночных автомобилей. После войны два друга увлеклись идеей постоянного полного привода. Построив экспериментальную полноприводную «тележку» под названием «Краб», Ролт и Диксон в 1950 году перешли под крыло Гарри Фергюсона, преуспевающего тракторного фабриканта. Так возникла фирма Harry Ferguson Research.
Фергюсона мало интересовали гоночные болиды, зато он мечтал о безопасном дорожном автомобиле, колёса которого не буксовали бы при разгоне и не блокировались при торможении. И Ролт с Диксоном решили спроектировать такую машину «с нуля» — полностью, включая кузов, трансмиссию и силовой агрегат!
Знаний друзьям не хватало, и на должность компетентного главного конструктора пригласили Клода Хилла, который ради столь интересной работы покинул Aston Martin. Но несмотря на финансы Фергюсона, работа шла неспешно — экспериментальный седан Ferguson R4 был готов только через шесть лет. Зато какой: полноприводный, с оппозитной «четвёркой», с дисковыми тормозами на всех колёсах и с электромеханической антиблокировочной системой Dunlop MaxaRet, позаимствованной из авиации!
Зато какой: полноприводный, с оппозитной «четвёркой», с дисковыми тормозами на всех колёсах и с электромеханической антиблокировочной системой Dunlop MaxaRet, позаимствованной из авиации!
Ferguson R4 (1956) — экспериментальный автомобиль с трансмиссией по Формуле Фергюсона. Вместо коробки передач у прототипа был гидротрансформатор.
Но самое интересное для нас заключалось внутри раздаточной коробки прототипа. Разобрав её, помимо дифференциала мы бы увидели ещё дополнительный «набор» шестерёнок, две шариковые обгонные муфты и два пакета фрикционов. Пока колёса не скользили, всё это хозяйство мирно вращалось вхолостую. Но когда начиналась пробуксовка колёс одной из осей и разность частот вращения выходных валов достигала определенной величины, одна из муфт срабатывала, сжимала «свой» пакет фрикционов — и те тормозили шестерни дифференциала, моментально блокируя его и превращая дифференциальный привод в жёсткий!
Следующий прототип Ferguson R5 1962 года, на подготовку которого снова ушло шесть лет, оказался ещё интереснее — это был легковой полноприводный универсал. Эксперты журнала Autocar, которые позже испытывали Ferguson R5, делились впечатлениями: «Автомобиль достигает предела скольжений на невероятно высоких скоростях!»
Эксперты журнала Autocar, которые позже испытывали Ferguson R5, делились впечатлениями: «Автомобиль достигает предела скольжений на невероятно высоких скоростях!»
Ferguson R5 был подготовлен к серийному производству в 1962 году.
Но никто из автомобилестроителей так и не взялся за выпуск первого в мире полноприводного универсала с межосевым самоблокирующимся дифференциалом и с АБС — слишком сложным и дорогим получился бы серийный Ferguson. Однако в 1962 году Ролту всё-таки удалось заинтересовать руководство компании Jensen — он предложил адаптировать полноприводную трансмиссию для купе Jensen CV8 с трёхсотсильным крайслеровским мотором V8, которое тогда готовили к серийному производству. Полный привод оказался мощному и скоростному купе как нельзя кстати!
Схема раздаточной коробки FFD с цилиндрическим несимметричным межосевым дифференциалом и механизмом автоматической блокировки с помощью фрикционных муфт экспериментального автомобиля Jensen CV8 FF.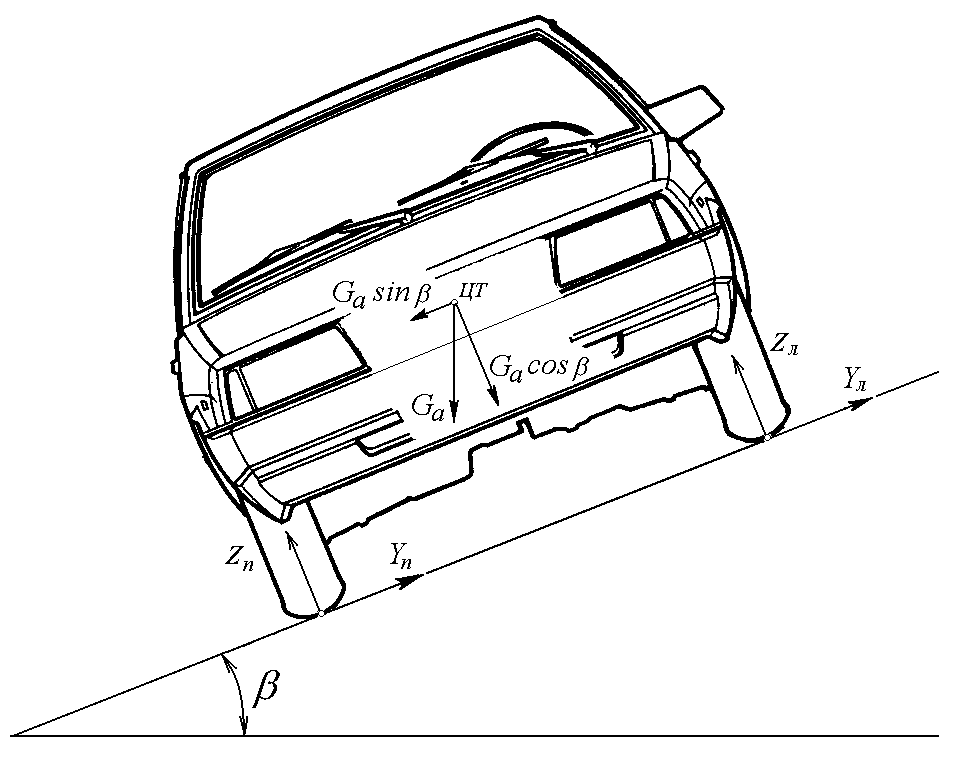 1 — входной вал; 2 — промежуточный полый вал; 3 — полый вал с солнечной шестернёй дифференциала и ведущей шестернёй блокирующего механизма; 4 — водило межосевого дифференциала; 5 — вал привода задних колёс; 6 — цепной привод; 7 — вал привода передних колёс; 8 — многодисковая муфта, включающаяся при буксовании задних колёс; 9 — многодисковая муфта, включающаяся при буксовании передних колёс; 10 — электромагнитная система MaxaRet.
1 — входной вал; 2 — промежуточный полый вал; 3 — полый вал с солнечной шестернёй дифференциала и ведущей шестернёй блокирующего механизма; 4 — водило межосевого дифференциала; 5 — вал привода задних колёс; 6 — цепной привод; 7 — вал привода передних колёс; 8 — многодисковая муфта, включающаяся при буксовании задних колёс; 9 — многодисковая муфта, включающаяся при буксовании передних колёс; 10 — электромагнитная система MaxaRet.
Через три года был построен экспериментальный полноприводный Jensen CV8 FF. А в 1966 году появилась следующая модель — Jensen Interceptor, с ещё более мощной 325-сильной «восьмёркой». Кроме заднеприводного купе предлагался и вариант со скромным шильдиком JFF. Это был знаменитый Jensen FF — первый в мире полноприводный серийный автомобиль с самоблокирующимся межосевым дифференциалом и с АБС! Буквы FF — это Formula Ferguson, обозначение запатентованной Ролтом и коллегами трансмиссии.
Схема трансмиссии FFD в экспериментальном автомобиле Jensen CV8 FF 1965 года. Разместить узлы и агрегаты привода на передние колёса помогла особенность компоновки: двигатель находился за осью передних колёс, поэтому оказалось возможным расположить главную передачу переднего моста между мотором и радиатором. Карданный вал для привода передних колёс поместили слева от силового агрегата (машина с «правым рулём»). 1 — двигатель; 2 — автоматическая коробка передач; 3 — раздаточная коробка; 4 — АБС MaxaRet; 5 — главная передача заднего моста; 6 — главная передача переднего моста.
Разместить узлы и агрегаты привода на передние колёса помогла особенность компоновки: двигатель находился за осью передних колёс, поэтому оказалось возможным расположить главную передачу переднего моста между мотором и радиатором. Карданный вал для привода передних колёс поместили слева от силового агрегата (машина с «правым рулём»). 1 — двигатель; 2 — автоматическая коробка передач; 3 — раздаточная коробка; 4 — АБС MaxaRet; 5 — главная передача заднего моста; 6 — главная передача переднего моста.
Все без исключения автомобильные журналисты того времени упоминали выдающуюся устойчивость полноприводных Дженсенов и «практически неограниченный запас тяги на мокром асфальте». Жаль, что самого Фергюсона к тому времени уже не было в живых — он умер в 1960-м…
Почему мы столь подробно рассказываем о Формуле Фергюсона? Да потому, что именно фирма Harry Ferguson Research впервые в мире уделила столь серьёзное внимание полному приводу как средству повышения активной безопасности!
Мы уже говорили, что привод на четыре колеса оставляет больший запас по сцеплению для восприятия боковых сил. И это плюс. Но есть и минус — теряется однозначность реакций на подачу топлива. Если на мощном заднеприводном автомобиле в скользком повороте резко нажать на газ, это вызовет занос задней оси. На переднеприводной машине, наоборот, при подаче тяги в скольжение сорвутся передние колёса. Хорошо это или плохо — не в том дело. Главное, что водитель всегда знает, как поведёт себя автомобиль в таком случае.
И это плюс. Но есть и минус — теряется однозначность реакций на подачу топлива. Если на мощном заднеприводном автомобиле в скользком повороте резко нажать на газ, это вызовет занос задней оси. На переднеприводной машине, наоборот, при подаче тяги в скольжение сорвутся передние колёса. Хорошо это или плохо — не в том дело. Главное, что водитель всегда знает, как поведёт себя автомобиль в таком случае.
А какая ось сорвётся в скольжение на полноприводном автомобиле? На этот вопрос ответить непросто. Если в данный момент больше разгружен передок или под передними колёсами более скользкое покрытие, то начнётся снос. А если худшие условия по сцеплению имеют задние колёса, то машина уйдёт в занос. Реакция может быть неоднозначной! И это небезопасно.
Jensen FF (1966–1971) — полноприводная версия купе Jensen Interceptor. Первый серийный полноприводный автомобиль с самоблокирующимся межосевым дифференциалом. Двигатель Chrysler V8 с «большим блоком» рабочим объёмом 6,3 л развивал 325 л. с. и приводил все колёса через трёхступенчатый «автомат» TorqueFlite или 4-ступенчатую механическую коробку. На диагональных шинах размерностью 6,70–15 (как у «Волги» ГАЗ-21) Jensen FF снаряжённой массой 1800 кг развивал 212 км/ч и набирал 100 км/ч за 7,7 с. Другие технические особенности: реечный рулевой механизм с гидроусилителем, дисковые тормоза всех колёс, одноканальная АБС Dunlop MaxaRet (от английского maximum retardation — максимальное замедление), независимая передняя подвеска на двойных поперечных рычагах и зависимая рессорная с тягой Панара сзади. В 1968 году в Великобритании Jensen FF стоил 6000 фунтов стерлингов — примерно столько же, сколько самый дешёвый Rolls-Royсe. Всего было выпущено 318 полноприводных машин.
с. и приводил все колёса через трёхступенчатый «автомат» TorqueFlite или 4-ступенчатую механическую коробку. На диагональных шинах размерностью 6,70–15 (как у «Волги» ГАЗ-21) Jensen FF снаряжённой массой 1800 кг развивал 212 км/ч и набирал 100 км/ч за 7,7 с. Другие технические особенности: реечный рулевой механизм с гидроусилителем, дисковые тормоза всех колёс, одноканальная АБС Dunlop MaxaRet (от английского maximum retardation — максимальное замедление), независимая передняя подвеска на двойных поперечных рычагах и зависимая рессорная с тягой Панара сзади. В 1968 году в Великобритании Jensen FF стоил 6000 фунтов стерлингов — примерно столько же, сколько самый дешёвый Rolls-Royсe. Всего было выпущено 318 полноприводных машин.
К счастью, Тони Ролт сам был гонщиком, причём очень хорошим — однажды, в начале 50-х, он даже выиграл 24-часовую гонку в Ле-Мане. Поэтому Ролт с коллегами с самого начала попытались избежать неоднозначности полного привода, применив несимметричный межосевой дифференциал. На задние колёса всех машин с фергюсоновскими трансмиссиями подавалось 63% крутящего момента, на передок — 37%. Таким образом реакция на увеличение тяги была приближена к заднеприводной.
На задние колёса всех машин с фергюсоновскими трансмиссиями подавалось 63% крутящего момента, на передок — 37%. Таким образом реакция на увеличение тяги была приближена к заднеприводной.
Самоблокирующийся дифференциал позволил Дженсену взять лучшее от обоих типов трансмиссий. Лёгкий вход в поворот и отсутствие циркуляции мощности в штатных режимах движения без пробуксовки — от дифференциального привода. А лучшую реализацию тяги двигателя при пробуксовке — от жёсткого.
Но обгонные муфты механизма блокировки работали жёстко, в пульсирующем режиме, моментально превращая несимметричный дифференциальный привод в блокированный и обратно. Поэтому при пробуксовке неоднозначность увеличивалась! Был нужен механизм, который бы более гибко и плавно изменял степень блокировки межосевого дифференциала. И в конце 60-х годов Тони Ролт вместе с Дереком Гарднером, который позже был главным конструктором болидов Tyrrell, занялись странными, на первый взгляд, экспериментами с силиконовой жидкостью, что использовалась в муфтах привода вентиляторов радиаторов. Да-да, именно Ролт с Гарднером вошли в историю как изобретатели вискомуфты!
Да-да, именно Ролт с Гарднером вошли в историю как изобретатели вискомуфты!
Самоблокирующиеся развиваются
Цилиндр с пакетами фрикционов внутри, заполненный силиконовой жидкостью, отлично подходил для намеченной Ролтом цели — тормозить шестерни межосевого дифференциала при пробуксовке колёс. Пока скорости вращения всех колёс примерно равны, вискомуфта никак не вмешивается в работу межосевого дифференциала. Но вот колёса одной из осей забуксовали. Шестерёнки межосевого дифференциала тут же начинают раскручиваться, связанные с ним пакеты фрикционов вискомуфты «взбивают» силиконовую жидкость, и муфта «схватывается», блокируя межосевой дифференциал частично или полностью.
Такое устройство блокировало дифференциал плавнее и мягче, что положительно сказывалось на управляемости. После оформления патентов на вискомуфту Тони Ролт в 1971 году образовал фирму FF Developments — специально для того чтобы оснащать автомобили полноприводными трансмиссиями своей разработки. Например, среди первых заказов фирмы были полноприводные версии фургончиков Bedford для английских лесничеств, партия автомобилей Ford Zephyr FF для полиции или седаны Opel Senator 4×4 для британской военной миссии в Берлине. Но самым главным достижением FFD стала трансмиссия для американского автомобиля AMC Eagle, который выпускался с 1979 по 1988 год. Это был обычный легковой AMC Concord, но с поднятым на 75 мм кузовом и с увеличенными «внедорожными» шинами. И конечно же, с полноприводной трансмиссией. Причём впервые в мире серийный автомобиль был оснащён межосевым дифференциалом, блокирующимся вискомуфтой!
Но самым главным достижением FFD стала трансмиссия для американского автомобиля AMC Eagle, который выпускался с 1979 по 1988 год. Это был обычный легковой AMC Concord, но с поднятым на 75 мм кузовом и с увеличенными «внедорожными» шинами. И конечно же, с полноприводной трансмиссией. Причём впервые в мире серийный автомобиль был оснащён межосевым дифференциалом, блокирующимся вискомуфтой!
Конечно, создавался AMC Eagle главным образом для тех, кто периодически штурмует бездорожье, — полный привод появился на этих машинах не из-за желания добиться более уверенного разгона или лучшей устойчивости и управляемости, как в случае с суперкаром Jensen FF или с Audi Quattro. Но с трансмиссионной точки зрения прямыми наследниками AMC Eagle стали такие драйверские автомобили, как Subaru Impreza Turbo или Mitsubishi Lancer Evo с первого по шестое поколения. Ведь их межосевые дифференциалы тоже блокируются встроенными вискомуфтами.
Раздаточная коробка автомобиля AMC Eagle разработки FFD. Обратите внимание на вискомуфту — это встроенный в межосевой дифференциал цилиндрический корпус с фрикционными дисками, заполненный вязкой кремнийорганической жидкостью (силоксан). При пробуксовке колёс одной из осей ведущий и ведомый пакеты дисков в вискомуфте проворачиваются относительно друг друга, давление и температура внутри возрастают, изменяется вязкость силоксана — и вискомуфта тормозит одну из выходных шестерён, не позволяя ей вращаться относительно корпуса и блокируя межосевой дифференциал.
Обратите внимание на вискомуфту — это встроенный в межосевой дифференциал цилиндрический корпус с фрикционными дисками, заполненный вязкой кремнийорганической жидкостью (силоксан). При пробуксовке колёс одной из осей ведущий и ведомый пакеты дисков в вискомуфте проворачиваются относительно друг друга, давление и температура внутри возрастают, изменяется вязкость силоксана — и вискомуфта тормозит одну из выходных шестерён, не позволяя ей вращаться относительно корпуса и блокируя межосевой дифференциал.
Серийное купе Audi Quattro, которое появилось в 1981 году, через два года после дебюта AMC Eagle, оснащалось обычным «свободным» межосевым дифференциалом с принудительной блокировкой. Правда, Фердинанд Пьех, который в начале 80-х был начальником инженерного департамента Audi, выбрал для Quattro очень изящную схему, отлично подходившую для компоновки ингольштадтских машин. Продольно расположенный силовой агрегат переднеприводного автомобиля прямо-таки указывал торцом коробки передач на задние колёса — осталось лишь встроить в корпус трансмиссии межосевой дифференциал. Но для привода на передние колёса конструкторы Пьеха не стали городить традиционный для полноприводников огород с отдельной «раздаткой». Немцы сделали вторичный вал коробки полым — и сквозь него пропустили приводной вал передних колёс. Воистину, всё гениальное просто…
Но для привода на передние колёса конструкторы Пьеха не стали городить традиционный для полноприводников огород с отдельной «раздаткой». Немцы сделали вторичный вал коробки полым — и сквозь него пропустили приводной вал передних колёс. Воистину, всё гениальное просто…
С самого начала на Audi, в отличие от FFD, выбрали симметричное распределение крутящего момента по осям — 50 : 50. А в 1984 году из салонов полноприводных Audi наконец-то исчезли архаичные ручки принудительной блокировки «центра» — в трансмиссиях Quattro появился привычный нам самоблокирующийся дифференциал Torsen. Название Torsen происходит от английских слов torque sensing и отражает способность этого чисто механического устройства мгновенно и плавно увеличивать степень своей блокировки в ответ на изменение крутящего момента на выходных валах. Поэтому Торсену не нужна вискомуфта — он блокируется сам. Причём срабатывает не от разности скоростей вращения уже после начала пробуксовки, а ещё до начала скольжения: Torsen способен реагировать на изменение сцепных условий в пятне контакта шин с дорогой!
Кстати, когда в последнее время конструкторы больших внедорожников стали задумываться о достижении «легковой» управляемости, они тоже вспомнили про Torsen — он используется в трансмиссиях таких автомобилей, как новый Range Rover, VW Touareg/Porsche Cayenne и Toyota Land Cruiser Prado.Dodge_Page_04_Image_0001.jpg)
Но вернёмся в 80-е. Триумфальный выход Audi Quattro на раллийную сцену послужил началом полноприводного бума — все раллийные команды группы В бросились создавать версии 4×4. Один за другим появились Peugeot 205 T16, Metro 6R4, Lancia Delta S4, Ford RS200… Все как один — с вискомуфтами в самоблокирующихся дифференциалах разработки FFD. За работу с раллийными командами на FFD отвечал Стюарт Ролт, сын Тони…
В начале 90-х годов обращался к FFD и завод АЗЛК, когда было решено проектировать раллийную полноприводную модификацию «Москвича»-2141. С помощью англичан была создана трансмиссия с тремя самоблокирующимися дифференциалами — передним, задним и межосевым (точь-в-точь как на болидах Ford RS200). Управляемость экспериментальных полноприводных «Москвичей» в предельных режимах заслуживала самых лестных оценок — поведение машин в скольжении было предсказуемым и удобным для гонщиков. Оказалось, что, подбирая «жёсткость» блокирующих вискомуфт во всех трёх дифференциалах, можно в широком диапазоне настраивать управляемость автомобиля. Например, более «строгая» блокировка заднего межколёсного дифференциала повышает склонность автомобиля к заносу задней оси. Увеличение коэффициента блокировки переднего или межосевого дифференциала, наоборот, повышает запас устойчивости — автомобиль менее охотно заезжает в поворот из-за проскальзывания и сноса передних колёс.
Например, более «строгая» блокировка заднего межколёсного дифференциала повышает склонность автомобиля к заносу задней оси. Увеличение коэффициента блокировки переднего или межосевого дифференциала, наоборот, повышает запас устойчивости — автомобиль менее охотно заезжает в поворот из-за проскальзывания и сноса передних колёс.
Однако такая настройка актуальна только в одном случае — при раллийном стиле езды со скольжениями. Поэтому три самоблокирующихся дифференциала — это прерогатива болидов группы WRC. Причём на этих машинах, как правило, внутрь дифференциалов встроены уже не вискомуфты, а пакеты многодисковых фрикционов с гидроприводом и с электронным управлением. Таким образом конструкторы получают широчайшие возможности по настройке управляемости в режиме реального времени. Например, при входе в поворот бортовой компьютер может «распустить» муфты во всех трёх дифференциалах, превратив их в «свободные» — чтобы автомобиль легче заходил в вираж. А когда пилот начнёт ускоряться при выходе на прямую, электроника даст команду, и сервопривод «зажмёт» муфты в дифференциалах таким образом, чтобы добиться минимальной пробуксовки всех колёс и в то же время не перейти грань приемлемой недостаточной поворачиваемости, за которой болид вынесет наружу виража.
Кстати, первыми применили управляемые муфты в Daimler-Benz — в трансмиссии автомобиля Mercedes-Benz Е-класса 4Matic с кузовом W124 образца 1986 года. Причём муфт там было три — при необходимости электроника сперва подключала привод на передние колёса, а потом последовательно задействовала блокировки межосевого и заднего межколёсного дифференциалов. Но такая трансмиссия оказалась неоправданно сложной. Кроме того, на нестабильном покрытии электроника то подключала передние колёса, то отключала…
Ещё одним пионером применения электронноуправляемых муфт в скоростных автомобилях стала фирма Porsche — на модели Porsche 959 1986 года было две муфты, а электроника работала в четырёх режимах, которые мог выбирать водитель. Позже серийные автомобили с трансмиссиями подобной сложности начали выпускать японцы — это, например, Mitsubishi Lancer Evo, наиболее совершенный полноприводный дорожный автомобиль из всех, что когда-либо проходили испытания Авторевю. Эволюция с межосевым управляемым дифференциалом ACD и задним дифференциалом с активным распределением крутящего момента AYC способна творить чудеса…
Эволюция с межосевым управляемым дифференциалом ACD и задним дифференциалом с активным распределением крутящего момента AYC способна творить чудеса…
Вместо дифференциала
Пока раллийные инженеры колдовали с механизмами самоблокировки, конструкторы массовых легковушек, наоборот, пошли по пути упрощения — и вообще отказались от межосевого дифференциала, заменив его вискомуфтой. Первым европейским легковым автомобилем с такой трансмиссией стал Volkswagen Golf II Syncro 1985 года — его трансмиссию разрабатывали инженеры фирмы GKN, которая ещё в 1969 году приобрела FFD. Преимуществами такой схемы были простота и унификация полноприводной модели с базовой. В нормальных условиях автомобиль сохранял характеристики и управляемость переднеприводного, а при пробуксовке передних колёс уже через 0,2 секунды срабатывала вискомуфта, способная подавать назад до 70% крутящего момента.
Компоновка трансмиссии VW Golf III Syncro. «Раздатка» пристыкована к коробке передач, а вискомуфта установлена в блоке с главной передачей заднего моста и подключает привод на задние колёса при пробуксовке передних. На автомобилях VW Golf IV место вискомуфты заняла муфта Haldex.
На автомобилях VW Golf IV место вискомуфты заняла муфта Haldex.
Но такой «упрощенный» привод задних колёс обладал существенным недостатком — даже небольшая задержка в срабатывании вискомуфты усугубляла неоднозначность реакций. При подаче газа в скользком повороте автомобиль сначала сносило наружу, как переднеприводный, а потом, с подключением задних колёс, он резко менял характер — и мог уйти в занос.
Здесь отличились японцы — они неоднократно пытались сгладить этот недостаток, подбирая характеристики вискомуфт и используя их не только для включения привода на задние колёса, но и для блокировки межколёсных дифференциалов. На некоторых моделях (например Nissan Sunny/Pulsar 1988 года) было аж три вискомуфты: одна включала привод на задние колёса, а две другие служили для блокировки межколёсных дифференциалов. В автомобилях Ноnda Concerto 4WD вискомуфты заменяли не только межосевой, но и задний межколёсный дифференциал…
Но потом оказалось, что вместо вискомуфты в приводе задних колёс гораздо удобнее использовать просто фрикционную муфту, пакеты которой сжимаются гидроприводом. А управлять сжатием фрикционов и, соответственно, регулировать величину подаваемого к задним колёсам крутящего момента отлично может электроника.
А управлять сжатием фрикционов и, соответственно, регулировать величину подаваемого к задним колёсам крутящего момента отлично может электроника.
Нынче большинство легковых полноприводников и паркетников имеют в приводе одной из осей управляемую муфту — будь то Haldex на автомобилях гольф-платформы концерна VW, система VTM-4 фирмы Honda или xDrive на BMW. Причём быстродействие современных муфт сделало задержку в подключении колёс практически незаметной — теперь всё зависит только от того, как настроена управляющая электроника. Например, трансмиссии автомобилей Golf 4Motion и Audi A3 Quattro совершенно идентичны конструктивно. Но разное программное обеспечение позволяет фольксвагеновцам выбирать симметричное распределение момента по осям, а инженеры Audi предпочитают подавать назад только 40% тяги, придавая своим машинам более переднеприводный характер. Дело вкуса…
А какие из этих схем предпочитаем мы? Легковые дорожные автомобили с подключаемым вручную приводом на вторую ось ныне, слава богу, не выпускаются. А что касается остальных трёх схем…
А что касается остальных трёх схем…
Конечно же, самые интересные, с нашей точки зрения, автомобили — это наследники Формулы Фергюсона, в трансмиссиях которых есть самоблокирующийся межосевой дифференциал. И неважно, какими путями осуществляется блокировка — вискомуфтой, как на автомобилях Subaru, механическим дифференциалом Torsen, как на моделях Audi A4-A6-A8 Quattro, VW Phaeton, или электронноуправляемыми муфтами (Mitsubishi Lancer Evo). Главное, что автоматически блокирующийся «центр» при грамотной настройке может значительно улучшить управляемость автомобиля — сделать его более безопасным и приятным для искушённого водителя.
Главная тенденция сегодня — изменяемый вектор тяги, когда момент превентивно по команде электроники подаётся на то колесо, что способно максимально эффективно его реализовать. Пока самая сложная полноприводная трансмиссия в мире — у седана Mitsubishi Lancer Evo X. Дополнительные редукторы способны перебрасывать момент между задними колёсами, центр блокируется электронноуправляемой муфтой, а спереди — обычный механический самоблок. Эпоха полного привода таким, как мы его знаем, закончится с приходом электромобиля о четырёх мотор-колёсах.
Эпоха полного привода таким, как мы его знаем, закончится с приходом электромобиля о четырёх мотор-колёсах.Но машины с автоматически подключаемым приводом на задние колёса мы тоже не сбрасываем со счетов — их становится всё больше. Муфту Haldex в последнее время активно используют Volvo и Saab. Трансмиссии со «свободными» межосевыми дифференциалами тоже находят своё применение — причём на таких скоростных автомобилях, как Мерседесы 4Matic всех классов. Но на этих машинах вместе с дифференциальным полным приводом в обязательном порядке «работает» неотключаемая антипробуксовочная электроника, которая в какой-то мере компенсирует отсутствие механизма самоблокировки.
Многодисковая муфта Haldex срабатывает от малейшего рассогласования скоростей вращения валов (1 и 5). Вращение любой из кулачковых шайб приводит к тому, что ролики начинают обкатываться по рабочим поверхностям (12) и перемещаться взад-вперёд, толкая поршни (10) в кольцевых цилиндрах насоса (на рисунке не показаны).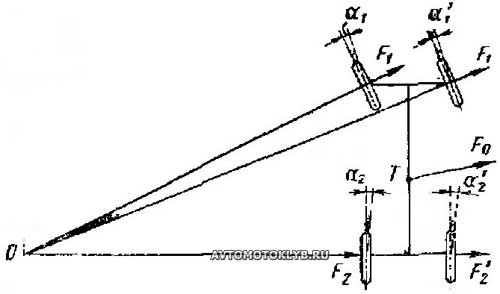 Поршни накачивают масло в исполнительный цилиндр с поршнем (11), который и сжимает пакет дисков. Но электроника с помощью электромагнитного клапана может стравливать давление, тем самым гибко регулируя величину подводимого к колёсам момента. 1 — приводной вал; 2 — наружные фрикционные диски; 3 — внутренние фрикционные диски; 4 — уравновешивающая пружина; 5 — выходной вал; 6 — ступица; 7 — корпус; 8 — кулачковая шайба; 9 — ролики; 10 — кольцевые нагнетательные поршни; 11 — кольцевой рабочий поршень; 12 — профилированная рабочая поверхность.
Поршни накачивают масло в исполнительный цилиндр с поршнем (11), который и сжимает пакет дисков. Но электроника с помощью электромагнитного клапана может стравливать давление, тем самым гибко регулируя величину подводимого к колёсам момента. 1 — приводной вал; 2 — наружные фрикционные диски; 3 — внутренние фрикционные диски; 4 — уравновешивающая пружина; 5 — выходной вал; 6 — ступица; 7 — корпус; 8 — кулачковая шайба; 9 — ролики; 10 — кольцевые нагнетательные поршни; 11 — кольцевой рабочий поршень; 12 — профилированная рабочая поверхность.
Однако в последнее время мы замечаем, что по реальным ездовым свойствам автомобили с разными полноприводными трансмиссиями становятся все ближе друг к другу — естественно, при движении по дорогам общего пользования, а не на раллийных трассах. И чем более совершенными будут становиться электронные антипробуксовочные системы и программы управления муфтами типа Haldex, тем меньше будет различаться управляемость оснащённых ими автомобилей. Очевидно, это и есть прогресс.
Материал адаптирован к публикации с разрешения ООО «Газета «Авторевю». Все права на перепечатку принадлежат Авторевю.
Комплектации и цены Range Rover Evoque (Рендж Ровер Эвок)
Range Rover Evoque – компактный кроссовер премиум-класса. Производится с 2011 года. В 2019 широкой публике был представлен второй рестайлинг. Автолюбители нередко называют Evoque «бэби-рэндж». Габаритные размеры этого автомобиля: длина – 4,371 м, ширина – 1,904 м, высота – 1,649 м, колесная база – 2,681 м, клиренс – 21,6 см. Глубина преодолеваемого брода – 0,6 м.
Эвок похож на своего более крупного собрата Велар почти как близнец. Именно в этом и была задумка дизайнеров Land Rover. Range Rover Evoque – уменьшенная почти точная копия Range Rover Velar:
- Задние блок фары, линия крыши, форма передней оптики и дизайн бампера похожи точь-в-точь.
- Ручки дверей при снятии блокировки тоже выдвигаются.
Внешний вид новинки – это сочетание крутизны и стиля. Салон – красив, удобен, эргономичен. Сзади стало немного просторнее, чем в дорестайлинговой модели – производитель учел пожелания автовладельцев. В спинках передних сидений установлены слоты для зарядки гаджетов. Мультимедиа система представлена Touch Duo Pro.
Салон – красив, удобен, эргономичен. Сзади стало немного просторнее, чем в дорестайлинговой модели – производитель учел пожелания автовладельцев. В спинках передних сидений установлены слоты для зарядки гаджетов. Мультимедиа система представлена Touch Duo Pro.
Коробка передач 9-ти ступенчатая автоматическая. Вместо традиционной «шайбы» теперь джойстик-селектор.
Новый Эвок базируется на платформе Premium Transverse Architecture – расположение двигателя поперечное. Кузов у машины сделан из стали. Алюминиевые только стаканы передних амортизаторов.
Передняя и задняя подвески независимые типа McPherson. Обе с пружинами и со стабилизаторами поперечной устойчивости. Энергоемкость подвески отличная – автомобиль как бы парит над дорогой. Шумоизоляция тоже улучшена – даже на максимальной скорости в салоне очень тихо.
На выбор, в зависимости от комплектации, несколько вариантов двигателей – бензиновых и дизельных.
По краш-тесту EuroNCAP (2011 и 2019 гг.) машина получила пять звезд из пяти возможных.
Комплектации
Новый Эвок представлен в 7 вариантах компоновки:
- Evoque;
- S;
- HSE;
- R-Dynamic S;
- R-Dynamic SE;
- R-Dynamic HSE;
- First Edition.
Базовая комплектация неплохо упакована. Она включает 17-дюймовые 10-ти спицевые колесные диски, передние и задние парктроники, камеру заднего вида, фары на светодиодах, передние сиденья с механической регулировкой по 8 параметрам, отделку диванов прочной тканью.
First Edition – лимитированная версия. Это топовая комплектация с множеством электронных помощников – пакеты опций Park и Drive, крутыми мультимедиа и аудиосистемами, кожаным салоном, передними подогреваемыми сиденьями с электрорегулировкой по 14 параметрам и функцией памяти и 10-дюймовыми колесными дисками.
Не знаете, какая комплектация подойдет вам лучше всего? Воспользуйтесь конфигуратором на сайте. Он же поможет определиться с дополнительными опциями. Для уточнения технических характеристик и записи на тест-драйв свяжитесь с нашими менеджерами по телефону. Если нужного автомобиля нет в наличии, вы можете его заказать. Подробности по телефону – звоните.
Если нужного автомобиля нет в наличии, вы можете его заказать. Подробности по телефону – звоните.
Статическая и динамическая устойчивость
Расчет статической и динамической устойчивости выполняется для:
- выбора основной схемы энергосистемы и уточнения размещения основного оборудования;
- выбора рабочих режимов энергосистем;
- выбора мероприятий по повышению устойчивости энергосистем;
- определения параметров настройки систем регулирования и управления, релейной защиты (РЗ), автоматического повторного включения (АПВ) и др.;
- определения параметров настройки систем ПК, предназначенных для повышения устойчивости энергосистем;
- проверки выполнения нормативных показателей устойчивости.
ИКНЭТ предоставляет услуги по проведению расчетов статической и динамической устойчивости.
Динамическая устойчивость энергосистемы
Динамическая устойчивость – способность энергосистемы возвращаться к установившемуся режиму работы после значительных возмущений (КЗ, отключение любого элемента энергосистемы и т. п.), при которых изменения параметров режима по сравнению со значениями этих параметров без перехода к асинхронному режиму.
п.), при которых изменения параметров режима по сравнению со значениями этих параметров без перехода к асинхронному режиму.
При определении методов анализа динамической устойчивости оператор системы передачи (ОСП) применяет следующие правила:
- Если границы статической устойчивости достигаются ранее границ динамической устойчивости, ОСП с учетом аварийных ситуаций из перечня аварийных ситуаций должен выполнять анализ динамической устойчивости только на основе результатов расчетов динамической устойчивости, выполненных для долгосрочного планирования.
- Если при планировании отключений пределы динамической устойчивости достигаются ранее границ статической устойчивости, ОСП с учетом аварийных ситуаций из перечня аварийных ситуаций должен провести анализ динамической устойчивости на этапе оперативного планирования на день вперед, пока эти режимы существуют. ОСП должен подготовить корректирующие действия, которые будут использоваться в случае необходимости во время работы в реальном времени.

- Если сеть в режиме реального времени находится в ситуации «N», а границы динамической устойчивости достигаются ранее границ статической устойчивости, ОСП с учетом аварийных ситуаций из перечня аварийных ситуаций должен проводить анализ динамической устойчивости на всех этапах оперативного планирования и быть способным быстрее повторно оценивать пределы динамической устойчивости после существенного изменения режима.
Если анализ динамической устойчивости указывает на нарушение границ устойчивости, ОСП должен разработать, подготовить и активизировать корректирующие действия с целью поддержания устойчивости системы передачи. Эти корректирующие действия могут охватывать пользователей системы передачи / распределения.
ОСП должен настроить оборудование, релейная защита и противоаварийная автоматика таким образом, чтобы при ликвидации нарушений, способных привести к широкомасштабной потери устойчивости системы, был меньше, чем критическое время устранения повреждений, исчисленный ним при анализе динамической устойчивости.
Объектом исследования динамической устойчивости является расчет реакции системы на конкретный набор аварий, обычно однофазных или трехфазных КЗ, которые можно устранить путем отключения линий электропередачи. Выполняется проверка реакции генераторов для того, чтобы убедиться, что все оборудование работает синхронно, затухания колебаний в энергосистеме остаются на допустимом уровне и восстановление напряжения после аварии происходит должным образом.
Моделирование переходных процессов должно учитывать все соответствующие воздействия во временных рамках, представляющих интерес, обычно несколько секунд после возникновения аварии, является объектом анализа переходных режимов. Также необходимо точно воспроизвести реакцию системы учитывая частоту зафиксированных колебаний. Обычно, колебания в энергосистеме возникают в диапазоне от 0,2 до 2 Гц. Также очень важным является моделирование способности (или неспособности) станции контролировать напряжение в этих временных рамках.
Пример однофазного короткого замыкания на ВЛ 150 кВ продолжительностью 500 мс приведены ниже.
Статическая устойчивость энергосистемы
Статическая устойчивость – способность энергосистемы возвращаться к установившемуся режиму после малых возмущений режима, при которых изменения параметров очень малы по сравнению с их средними значениями.
Запас статической устойчивости для установившегося режима работы энергосистем определяется его близостью к границе области устойчивости. Этот запас характеризуется коэффициентами запаса. По условиям статической устойчивости энергосистем нормируют минимальные коэффициенты запаса по активной мощности в сечениях и минимальные коэффициенты запаса по напряжению в узлах нагрузки. Кроме того, устанавливают группы нормативных возмущений, при которых должны обеспечиваться как динамическая устойчивость, так и нормативные запасы статической устойчивости в послеаварийных режимах.
Для определения коэффициента запаса статической устойчивости по активной мощности в сечении схемы выполняются утяжеления режима путем увеличения перетока мощности в сечении до получения предельного по устойчивости режима.
Во время эксплуатации для контроля за соблюдением нормативных запасов статической устойчивости следует, как правило, использовать значение перетоков активной мощности. При необходимости задают как функции перетоков в других сечениях максимально допустимые и аварийндопустимые перетоки. Такие перетоки и напряжение следует считать контролируемыми параметрами. В зависимости от конкретных условий как контролируемые можно использовать другие параметры режима энергосистемы, в частности значения углов между векторами напряжения на концах линии электропередачи. Допустимые значения контролируемых параметров, при которых обеспечивается нормативный коэффициент запаса по активной мощности, устанавливают на основе расчетов соответствующих режимов работы энергосистем.
Для контроля соблюдения нормативных запасов напряжения в эксплуатационной практике можно использовать напряжение в любых узлах энергосистемы. Допустимые значения напряжения в контролируемых узлах устанавливают по расчетам режимов работы энергосистем.
Для получения полной картины по статической устойчивости режимов работы энергоблоков электростанций ОЭС Украины, необходимо осуществить проверку исходных нормальных, ремонтных и послеаварийных режимов колеблющуюся устойчивость с учетом соответствующих математических моделей как самих генераторов, так и их систем возбуждения с АРВ.
Ниже показано скольжение роторов генераторов и напряжений на выходе АРЗ 57 генераторов электростанций Украины. Как видно из этих зависимостей — исходный режим работы всех генераторов статически устойчив.
Пример однофазного короткого замыкания на ВЛ 150 кВ продолжительностью 500 мс приведены ниже.
Значения показателей устойчивости в зависимости от перетока в сечении, схемы сети и нормативных возмущений должны быть не ниже приведенных в таблице.
| Переток в сечении | Минимальный коэффициент запаса по активной мощности Кр | Минимальный коэффициент запаса по напряжению Кu | Группы возмущений, при которых должна обеспечиваться устойчивость в сечении | |
| при нормальной схеме | при ремонтной схеме | |||
| Нормальный | 0,20 | 0,15 | І, ІІ, ІІІ | І, ІІ*, ІІІ** |
| Утяжелённый | 0,20 | 0,15 | І, ІІ | І |
| Вынужденный (послеаварийный) | 0,08 | 0,10 | — | — |
Примечание:
* — кроме однофазного КЗ с отказом выключателя и действием УРОВ в сети напряжением 110 — 220 кВ.
** — только для многофазного КЗ с успешным и неуспешным АПВ в сети напряжением 750 кВ.
Расчеты устойчивости энергосистем и расчетная проверка мер по ее обеспечению является обязательной частью работ по проектированию и эксплуатации энергосистем.
Системой курсовой устойчивости и силы тяги (DSTC). | Система стабилизации и контроля тяги | Поддержка водителя | S60 2014
Система динамической стабилизации и контроля тяги, DSTC (Dynamic Stability & Traction Control), помогает водителю избежать заносов и улучшает тягу автомобиля.
При торможении срабатывание система может восприниматься в виде пульсирующего звука. При подаче газа ускорение автомобиля может быть ниже ожидаемого.
Эта система обладает следующими функциями:
- Функция антиюза
- Противобуксовочная функция
- Функция тягового усилия
- Контроль остановки двигателя – EDC
- Corner Traction Control — СТС
- Стабилизатор прицепа автомобиля* – TSA
Функция антиюза
Для повышения устойчивости автомобиля функция контролирует отдельно тяговое и тормозное усилие колес.
Противобуксовочная функция
Во время ускорения функция не допускает проскальзывание ведущих колес на дорожном покрытии.
Функция тягового усилия
Функция, действуя на низких скоростях, передает усилие с ведущего колеса, которое пробуксовывает, на ведущее колесо, которое не делает этого.
Контроль остановки двигателя (EDC)
EDC (Engine Drag Control) препятствует внезапной блокировке колес, например, после понижения передачи или торможения двигателем при движении на низкой передаче по скользкому дорожному покрытию.
Внезапная блокировка колес во время движения может в том числе затруднить управление автомобилем.
Corner Traction Control (СТС)*
CTC компенсирует недоуправление и допускает повышение ускорения на поворотах без пробуксовки внутренних колес, например, при выезде на дорогу по кривой, чтобы автомобиль мог быстрее встроиться в существующий дорожный темп.
Стабилизатор прицепа автомобиля
Стабилизатор прицепа автомобиля предназначен для стабилизации автомобиля с прицепом в ситуациях, когда экипаж подвергается автоколебаниям. Дополнительную информацию см. Езда с прицепом.
Примечание
Функция отключается, когда водитель выбирает режим Sport.
Автомобильное стекло триплекс – виды лобового стекла, отличие от сталинита, технология производства автомобильного триплекса
Классическим вариантом решения этой задачи стало применение закаленных стекол, которые получили название сталинит. Они отличались достаточно высокой прочностью и долгое время устанавливались практически на все легковые, коммерческие и грузовые автомобили. Но с повышением требований к безопасности движения их запретили применять в качестве лобовых стекол. Теперь они используются только для остекления задней и боковых частей автомобилей. В качестве же переднего стекла теперь разрешается устанавливать только специальный автомобильный триплекс.
Это особое многослойное автостекло, которое начали широко внедрять в автомобилестроении с конца 1940-х годов. Оно состоит из двух и более слоев стекла, между которыми расположена полимерная пленка. Такая конструкция обладает очень важным качеством – при сильных механических ударах не распадается на осколки, способные причинить серьезные увечья, а остается единым монолитным изделием. Это происходит благодаря тому, что части разбитого стекла удерживаются вместе за счет надежного склеивания полимерной пленкой.
Сравнение автомобильного триплекса и сталинита
Рассмотрим основные преимущества и недостатки классических каленых лобовых стекол и триплекса:
| Характеристика | Автомобильное стекло триплекс | Сталинит |
| Сложность изготовления | Высокая, что увеличивает вероятность брака при несоблюдении технологии производства | Достаточно простая |
| Ударопрочность | Очень высокая. Возможно исполнение триплекса, способного выдерживать прямые выстрелы из огнестрельного оружия. Возможно исполнение триплекса, способного выдерживать прямые выстрелы из огнестрельного оружия. | Низкая. Закаленное стекло может разбиться даже от удара небольшого камня, вылетевшего из-под колес идущей впереди машины. |
| Характер осколков | Отсутствие осколков. | Осколки с тупыми гранями, имеющие кубическую форму. Относительно безопасные, но способные вызвать сильные травмы органов зрения. |
| Вес | Довольно тяжелое, особенно при большом количестве слоев. | Достаточно легкое. |
| Дополнительные возможности | Защита от ультрафиолетового излучения, большое количество цветов, электрический обогрев. | Защита от ультрафиолетового излучения. |
| Стойкость к царапинам | Высокая | Средняя |
| Экологичность | Высокая | Высокая |
| Ремонтопригодность | Возможность ремонта поврежденного участка лобового стекла. | Не подлежит восстановлению. |
| Срок службы | 25-50 лет | 15-20 лет |
Технология производства
Процесс изготовления автомобильного триплекса достаточно сложный. Он предъявляет высокие требования как к технологическому оснащению производственного предприятия, так и к квалификации персонала. Технические условия изготовления многослойного стекла регламентируются ГОСТ 30826-2014. Этот стандарт определяет основные характеристики изделий (точность размеров, оптические искажения, влагостойкость, термическая стойкость, устойчивость к ультрафиолету, плоскостность, класс защиты и пр.), а также методы их контроля.
Автомобильное стекло триплекс производится в несколько этапов:
- Изготовление стеклянных заготовок. Они раскраиваются по форме специальных матриц и подаются в печь моллирования, где им придаются нужные изгибы. Материал не должен иметь поверхностных дефектов, инородных вкраплений, микротрещин. Готовые заготовки шлифуются, моются мыльным раствором и сушатся. Затем по периметру наносится черный кант, предотвращающий образование трещин.
- Прокладка поливинилбутиральной (ПВБ) пленки. Она обеспечивает склеивание отдельных листов стекла между собой. Помимо пленки в автомобильный триплекс может вставляться система электронного тонирования, подогрев и другие специальные элементы. Также в некоторых случаях применяется альтернативная технология склеивания стекол в пакеты. Вместо пленки в зазор между двумя стеклянными заготовками заливается жидкий полимерный состав.
- Термическая обработка. Склеенные стеклянные заготовки помещаются в автоклав, где они нагреваются и прессуются. Это позволяет получить монолитное цельное изделие. Температура обработки составляет около 150 градусов, а давление может превышать 12,5 бар.
 Готовые заготовки шлифуются, моются мыльным раствором и сушатся. Затем по периметру наносится черный кант, предотвращающий образование трещин.
Готовые заготовки шлифуются, моются мыльным раствором и сушатся. Затем по периметру наносится черный кант, предотвращающий образование трещин. Каждый этап производства автомобильного стекла триплекс должен тщательно контролироваться на предмет соответствия размеров, пропорций заготовок, отсутствия дефектов. Даже небольшое отклонение от требуемых технологических параметров может привести к браку. Процесс изготовления дополнительно усложняется тем, что работать приходится с хрупкими и сложными по форме материалами. Поэтому здесь требуется специализированное высокоточное оборудование с высокой степенью автоматизации, которое управляется и настраивается опытными операторами. Кроме того, большое значение имеет качество полимерной пленки, склеивающей стекла. Использование материалов с неподходящими параметрами может привести к расслоению пакета, появлению воздушных пустот, резкому снижению ударопрочности и класса защиты.
Виды автомобильного триплекса
Существует три основных вида многослойных лобовых стекол:
- стандартное. Оно имеет толщину около 6 мм и устанавливается в качестве базового варианта на большинство моделей автомобилей. Стандартный триплекс способен выдержать достаточно сильный удар камнем, бутылкой или другим предметом;
- защитное. Этот автомобильный триплекс обладает увеличенной толщиной – в среднем 8-10 мм. Он хорошо защищает машину от злоумышленников и вандалов. Его часто используют не только для лобового, но также для заднего и боковых стекол в топовых комплектациях автомобилей;
- бронированное. Самое толстое и прочное автомобильное стекло триплекс. Обычно оно имеет толщину 18-38 мм, но существуют и более мощные варианты. Такие пакеты могут выдержать прямое попадание в упор из пистолета ТТ. Самые толстые стекла даже могут противостоять пулям, выпущенным из крупнокалиберных снайперских винтовок.
Также при выборе автомобильного триплекса следует уделить внимание дополнительным возможностям. Стекло может оснащаться системой электрообогрева, датчиком дождя для автоматического включения дворников, электронным тонированием и другими функциональными элементами.
Чтобы не ошибиться в выборе лобового стекла, обращаться нужно к проверенным производителям с хорошей репутацией. Завод «ОСтек» осуществляет производство высококачественного триплекса с 2007 года. Узнать больше о продукции предприятия можно здесь.
Объяснение систем контроля устойчивости — Drivingfast.net
Электронные системы контроля устойчивости (SC для целей этой статьи) обнаруживают потерю тяги и реагируют, чтобы восстановить сцепление с дорогой, используя системы торможения и управления двигателем. Ситуации, в которых срабатывают системы, включают недостаточную поворачиваемость, избыточную поворачиваемость и вращение колес.
Большинство новых автомобилей теперь оснащены какой-либо системой контроля устойчивости. Существует множество сокращений для этой технологии, которые различаются в зависимости от производителя автомобиля…
- Электронная система контроля тяги (ETC / TCS)
- Система динамической стабилизации (DSC)
- Электронная программа стабилизации (ESP)
- Porsche Stability Management (PSM) )
- и т. Д.
Не обманывайтесь, думая, что каждая из этих систем уникальна — все они работают очень похожим образом (и обычно все производятся одним и тем же производителем).
Как работают системы контроля устойчивости?
Датчики Чтобы автомобиль обнаружил потерю тяги, ему необходимы датчики. Они бывают разных форм и определяют, как ведет себя автомобиль и что пытается делать водитель. Датчики рыскания, гироскопы, датчики скорости вращения колес и акселерометры являются наиболее распространенными датчиками в системах SC. Кроме того, информация от рулевого управления и положения педали, оборотов двигателя и выбора передачи используется для определения действий водителя.
Как используется эта информация?
Когда система SC определяет, что происходит потеря тяги, она действует, используя органы управления торможением и двигателем (а в некоторых автомобилях даже систему рулевого управления), чтобы вернуть автомобиль в движение. Система реагирует в соответствии с набором предустановленных критериев в зависимости от характера потери тяги, которая может включать вращающиеся колеса или салазки.
Вращающиеся колеса
Система регулирования тягового усилия используется для уменьшения потерь тяги при вращении колес.Это может произойти при движении по скользкой поверхности или при резком ускорении (обычно на первой передаче с места). Противобуксовочная система реагирует на торможение вращающегося колеса, и это заставляет привод переключиться на колесо (а) с наилучшим сцеплением. Антипробуксовочная система обычно работает только ниже определенной скорости.
Скольжение
Есть два разных типа скольжения — недостаточная и избыточная поворачиваемость. Системы SC реагируют на эти ситуации, применяя тормоза к отдельным колесам и уменьшая крутящий момент двигателя, когда это необходимо, чтобы поддерживать автомобиль в рабочем состоянии.Во время недостаточной поворачиваемости крутящий момент снижается, и возникающего в результате переноса веса вперед обычно достаточно для восстановления управления; если этого недостаточно, чтобы вернуть автомобиль в исходное положение, будут задействованы отдельные задние тормоза. Когда возникает избыточная поворачиваемость, тормозное усилие прикладывается к одному из передних колес, которое действует как стержень, чтобы вернуть автомобиль в рабочее состояние. Как правило, тормоза применяются только к колесам, которые имеют наибольшее сцепление с дорогой.
как система задействует тормоза?
Почти каждый автомобиль теперь имеет АБС в стандартной комплектации.Эта спасательная система позволяет вам продолжать управлять автомобилем при торможении, регулируя тормозное давление и предотвращая блокировку колес. В системе используется гидравлический двигатель для создания тормозного давления, и этот же двигатель используется системами SC для приложения тормозной силы к отдельным колесам, где это возможно, а клапаны в блоке ABS регулируют давление.
Недостатки систем контроля устойчивости
Как обсуждалось выше, в системах SC используются как тормоза, так и средства управления двигателем для уменьшения пробуксовки или скольжения колес.Отлично на дороге, но когда вы едете по трассе, последнее, что вам нужно, — это тормозить автомобиль! У большинства высокопроизводительных автомобилей есть возможность отключить (или значительно уменьшить) системы SC с помощью кнопки на приборной панели. Поэкспериментируйте, выключив управление, и посмотрите, как ведет себя машина. Если у вас возникла дурная привычка позволять системам SC разбирать вас на поворотах, вы можете начать вращаться в первом повороте, поэтому будьте осторожны и постепенно увеличивайте скорость по мере повышения вашей уверенности.
Противобуксовочная система и системы контроля устойчивости: в чем разница?
Разница между контролем тяги и контролем устойчивости подобна разнице между GED и степенью магистра или доктора философии в области безопасности транспортных средств. Контроль устойчивости — это просто антипробуксовочная система с дополнительным обучением (компьютерное программирование) и лучшими инструментами (более мощный процессор и больше электронных датчиков).
Ясно, что антиблокировочная тормозная система, или ABS, как мы ее теперь знаем, была первой — на Imperial 1971 года.В том же году Buick Riviera представила MaxTrac, примитивную систему контроля тяги без вмешательства тормозов, которая вместо этого сравнивала выходную скорость трансмиссии со скоростью передних колес для обнаружения пробуксовки и отсечения искры двигателя до тех пор, пока скорости передних и задних колес не сравнялись. Сообщается, что из-за отсутствия возможности уменьшить количество топлива, протекающего через карбюратор, это привело к впечатляющим обратным результатам.
Система стабилизации вроде дебютировала на японском рынке 1990 года Mitsubishi Diamante, которую по-разному называли системой активного отслеживания и контроля тяги, затем Active Skid and Traction Control (ASTC), но впервые в Америке появилась система, подобная тем, которые мы знаем сегодня. с помощью Bosch на купе Mercedes-Benz S600 1995 года.Давайте рассмотрим и сравним существующие сегодня системы.
Что такое трекшн-контроль?
Просмотреть все 4 фотографииЭта функция активной безопасности была разработана, чтобы позволить транспортным средствам оптимально использовать ускоряющуюся тягу, имеющуюся на любой заданной поверхности, путем измерения пробуксовки колес и последующего управления ею с помощью гидравлических соленоидов антиблокировочной тормозной системы. тормозное давление и / или использование электронного управления дроссельной заслонкой, топливом или искрой двигателя для уменьшения мощности и замедления вращающегося колеса.Эти системы часто предлагают возможность отключения. Кнопка для этого может быть помечена TC, TCL или значком, изображающим заднюю часть автомобиля над двумя знаками выгорания в форме буквы S. Если ваш автомобиль оборудован системой контроля тяги и устойчивости, они почти наверняка будут управляться одной и той же кнопкой, которая затем может быть помечена как ESC, VSC или со значком. Чтобы увидеть полный список сокращений, используемых для контроля тяги и устойчивости, прокрутите эту статью до конца.
Что такое система контроля устойчивости?
В современных системах контроля устойчивости используется все оборудование, необходимое для противобуксовочной системы и антиблокировочной тормозной системы (датчик нажатия педали тормоза и датчики скорости вращения колес на каждом колесе, а также корпус гидравлического клапана, способный сбрасывать или увеличивать давление в тормозной системе). тормозной контур для каждого колеса независимо) и добавляет несколько новых датчиков.Датчик положения рулевого колеса соединяется с датчиками педали тормоза и акселератора, чтобы сообщить системе предполагаемый путь и скорость водителя. Датчик рыскания измеряет, насколько автомобиль вращается вокруг своей вертикальной оси (то, что вы ощущаете как занос или вращение), а модуль трехосного акселерометра определяет как поперечное, так и продольное ускорение, а также любой угловой уклон, по которому движется транспортное средство. . Обращаясь ко всем этим датчикам, более мощный компьютер затем сравнивает фактическое движение автомобиля с намерением водителя.Если они не совпадают, система применяет отдельные колесные тормоза (а также органы управления двигателем, если необходимо), чтобы привести траекторию транспортного средства в соответствие с намерениями водителя. Обратите внимание: поскольку контроль устойчивости стал обязательным в США в 2012 году, все новые легковые автомобили оснащены святой троицей систем помощи водителю: ABS, системой контроля тяги и контроля устойчивости.
Как система стабилизации изменяет траекторию движения автомобиля?
Если вы когда-нибудь занимались греблей на каноэ, каяках или рафтингом, вы, вероятно, управляли лодкой, гребя спиной по той стороне, в которую вы хотите направиться.Система контроля устойчивости делает то же самое — добавляет тормозное давление к одной стороне автомобиля, чтобы мягко поворачивать его в этом направлении, с разными результатами в зависимости от того, задействованы ли передние или задние тормоза и насколько сильно они задействованы. Помните, что водитель уже набрал желаемое количество рулевого управления, поэтому, если автомобиль не реагирует должным образом, то снижение тяги, сильный ветер или какая-то другая внешняя сила вызывает отклонение пути, поэтому просто заказывайте электрический помощь в рулевом управлении для большего поворота вряд ли даст желаемый эффект.Система контроля устойчивости делает свою работу незаметно для водителя, за исключением, возможно, мигания лампы контроля устойчивости, которая указывает на то, что система работает.
Просмотреть все 4 фотографииКак работают вместе ABS, антипробуксовочная система и система курсовой устойчивости?
Системы полностью интегрированы, поэтому невозможно обеспечить контроль устойчивости или антипробуксовочную систему без АБС. Блок гидравлических клапанов антиблокировочной тормозной системы позволяет регулировать скорость вращения колес, необходимую для ограничения пробуксовки колес, для контроля тяги и для контроля устойчивости, чтобы регулировать траекторию движения автомобиля.Некоторые автомобили позволяют водителям отключать или снижать эффективность систем. Кнопки отключения трекшн-контроля являются наиболее распространенными, кнопки отключения стабилизации менее распространены (и когда они существуют, они могут быть вложены в экранные меню, и они редко полностью выключают систему, как мы часто обнаруживаем в нашем тестировании Figure Eight). Как уже отмечалось, в этих системах также используется одна и та же кнопка. Обратите внимание, что начиная с B3 (’86 -’92) Audi 80/90 не предлагала выключатель ABS.
Моя система контроля устойчивости предлагает настройки — какие из них лучше?
Некоторые высокопроизводительные автомобили предлагают различные настройки (например, Chevrolet Corvette, многие модели Cadillac V-cars или любой автомобиль BMW M), адаптированные к более агрессивным дорожным ситуациям.Иногда они предлагают так много настроек, что форумы владельцев, вероятно, лучше подготовлены для ответа на этот вопрос. Транспортные средства, ориентированные на бездорожье, которые обеспечивают различные режимы местности, адаптируют уровень вмешательства в систему контроля устойчивости в каждом для соответствия различным ландшафтам, поэтому лучше всего просто настроить этот режим в соответствии с местностью, которую вы покрываете. В противном случае, John & Jane Q Public лучше всего не трогать эти кнопки контроля тяги и устойчивости на дорогах общего пользования. Настройки режима производительности часто доступны только из глубины дерева меню информационно-развлекательной системы или путем нажатия и удерживания кнопки в течение многих секунд.Они, как правило, делают систему более допускающей нейтральное скольжение или даже некоторую избыточную поворачиваемость. Если у вас были высокопроизводительные курсы обучения водителей и вы планируете водить машину по закрытой трассе с ограждениями и т. Д. (И готовы к страховым случаям, если что-то пойдет не так), включение этих настроек может действительно сделать вашу машину намного более увлекательной для вождения. Обратите внимание, что многие (но не все) из этих систем возвращаются в режим полной защиты, если вы касаетесь тормозов или нажимаете на них в середине слайда.
Когда мне следует выключать антипробуксовочную систему?
Если вы находитесь в обычном автомобиле без режимов движения, который слегка застревает в песке или снегу из-за того, что ваша система теряет мощность при первом намеке на пробуксовку колес, отключение части системы контроля тяги может позволить колесам двигаться. достаточно крутить, чтобы «сжечь» сквозь снег или песок до более цепкой поверхности внизу, и автомобиль снова начнет двигаться.
Когда следует выключать систему контроля устойчивости?
Вы выиграли титул SCCA или закончили гонку LeMans? Вы помогаете Ким Рейнольдс измерять производительность MotorTrend Figure Eight на нашем испытательном стенде? Если вы ответили «нет» на все это, то, возможно, никогда, поэтому производители обычно затрудняют доступ к режиму «выключено», чтобы никто случайно не отключил его.Мы не можем рекомендовать когда-либо полностью отключать контроль устойчивости на дороге общего пользования, но исключительные водители, стремящиеся полностью изучить возможности своего высокопроизводительного автомобиля на закрытой дороге или трассе, могут найти настройку «выключения» ценной.
Что вызывает загорание лампы контроля устойчивости?
Просмотреть все 4 фотографииКонтроль устойчивости — это система безопасности, поэтому ее работоспособность постоянно контролируется бортовой диагностической электроникой. Этот свет появляется, когда система либо выключена, либо переключена на более низкий уровень чувствительности, либо имеет какой-либо вид неисправности (некоторые режимы бездорожья снижают эффективность системы настолько, чтобы загорать лампу в этих режимах).Итак, если вы не коснулись переключателя, а он загорелся, у вас, вероятно, неисправность системы. Наиболее распространенными из них являются неисправности датчиков, и первыми должны выйти из строя датчики, установленные в элементах, такие как датчики скорости вращения колес. Они могут выйти из строя, повредиться в результате дорожно-транспортных происшествий или подвергнуться коррозии. Индикатор часто мигает, когда система контроля тяги и / или устойчивости активно вмешивается, чтобы вернуть автомобиль под контроль.
Какие еще названия для контроля устойчивости?
Вот список названий, которые различные производители используют для своих систем контроля устойчивости по всему миру:
Acura: Vehicle Stability Assist (VSA) (ранее CSL 4-Drive TCS)
Alfa Romeo: Vehicle Dynamic Control (VDC)
Audi: электронная программа стабилизации (ESP)
Bentley: электронная система стабилизации (ESP)
BMW: партнер по совместному проектированию и изобретатель с Robert Bosch GmbH и Continental (TEVES) Система динамического контроля устойчивости (DSC) (включая систему динамического контроля тяги)
Bugatti : Электронная система стабилизации (ESP)
Buick: StabiliTrak
Cadillac: StabiliTrak и StabiliTrak3.0 с активным передним рулевым управлением (AFS)
Chevrolet: StabiliTrak и Active Handling (только Corvette и Camaro)
Chrysler: электронная программа стабилизации (ESP)
Dodge: электронная программа стабилизации (ESP)
Fiat: электронный контроль устойчивости (ESC) и автомобиль Динамическое управление (VDC)
Ferrari: Controllo Stabilità (CST)
Ford: AdvanceTrac с системой контроля устойчивости при крене (RSC), интерактивной динамикой автомобиля (IVD) и электронной программой стабилизации (ESP)
General Motors: StabiliTrak
Honda: Система стабилизации автомобиля ( VSA) (ранее CSL 4-Drive TCS)
Hyundai: Электронная программа стабилизации (ESP), Электронный контроль устойчивости (ESC) и Система стабилизации автомобиля (VSA)
Infiniti: Система динамического контроля автомобиля (VDC)
Jaguar: Система динамической стабилизации (DSC) ) и автоматический контроль устойчивости (ASC)
Jeep: электронная программа стабилизации (ESP)
Kia: электронная система контроля устойчивости (ESC) и электронная программа стабилизации (ESP)
Lamborghini: электронная система стабилизации курсовой устойчивости am (ESP)
Land Rover: система динамической стабилизации (DSC)
Lexus: интегрированная система управления динамикой автомобиля (VDIM) с системой стабилизации автомобиля (VSC)
Lincoln: AdvanceTrac
Maserati: программа стабилизации Maserati (MSP)
Mazda: система динамической стабилизации (DSC) (включая систему динамического контроля тяги)
Mercedes-Benz соавтор с Robert Bosch GmbH: электронная система стабилизации (ESP)
Mini: система динамического контроля устойчивости
Mitsubishi: мультирежимная система активного противоскольжения и противобуксовочная система и активная система контроля устойчивости (ASC)
Nissan: система динамического контроля автомобиля (VDC)
Porsche: система стабилизации Porsche (PSM)
Subaru: система контроля динамики автомобиля (VDC)
Toyota: система контроля устойчивости автомобиля (VSC) и интегрированное управление динамикой автомобиля (VDIM)
Tesla: система электронного контроля устойчивости ( ESC)
Volvo: Система динамической стабилизации и контроля тяги (DSTC)
Volkswagen: Электронная система стабилизации (ESP)
Как это работает: Контроль устойчивости
Хлебная крошка b Trail Links
- Как это работает
- Feature Story
Множество датчиков и систем помогают вашей машине ехать туда, куда ей нужно, но они могут работать только на определенное количество времени
Автор статьи:
Джил МакИнтошДата публикации :
10 января 2018 г. • 7 февраля 2019 г. • 4 минуты чтения • Присоединяйтесь к разговоруСодержание статьи
Движение автомобиля боком — отличное развлечение для опытного гонщика на закрытой трассе, но это определенно не то, чем хотят заниматься водители. трафик на ежедневных поездках.Чтобы помочь вам оставаться на правильном пути, Transport Canada требует, чтобы каждое новое пассажирское транспортное средство, продаваемое в Канаде, начиная с 2012 модельного года, было оснащено электронной системой контроля устойчивости (ESC).
Объявление
Это объявление еще не загружено, но ваша статья продолжается ниже.
Содержание статьи
Система реагирует в миллисекундах, когда определяет, что транспортное средство движется не в том же направлении, что и рулевое управление — другими словами, занос — и немедленно принимает меры, чтобы все исправить.Считается достаточно важным то, что эта функция безопасности теперь также требуется на новых тракторных прицепах, продаваемых в Канаде, а в июне будущего года — также на междугородних и школьных автобусах.
Хотя все системы ESC в основном работают одинаково, между ними могут быть незначительные различия, поэтому автопроизводители часто присваивают им собственные имена. Вы можете увидеть, как это рекламируется под такими терминами, как Система стабилизации автомобиля (Acura), AdvanceTrac (Ford), StabiliTrak (General Motors) или Vehicle Dynamic Control (Nissan), среди многих других.
Объявление
Это объявление еще не загружено, но ваша статья продолжается ниже.
Содержание статьи
Контроль устойчивости очень помогает на наших зимних дорогах, но не на столько. Фото Майкла Пика / Toronto SunВ системе контроля устойчивости используются компоненты и датчики некоторых других функций безопасности автомобиля, включая антиблокировочную систему тормозов (ABS). Тормоза не дают колесам поворачиваться, но на самом деле именно шины, цепляющиеся за асфальт, останавливают автомобиль, и даже хорошие шины способны на многое.В транспортном средстве без АБС заклинивание тормозов приводит к блокировке колес, и шины могут скользить и превращать транспортное средство в гигантский тобогган.
До появления ABS водителей учили включать и выключать тормоза, давая шинам возможность цепляться за тротуар каждый раз, когда тормоза отпускаются. Антиблокировочная система тормозов делает то же самое, но с помощью электроники они нажимают и отпускают намного быстрее, чем это может сделать любой водитель, помогая сохранять устойчивость автомобиля при остановке. При панической остановке в автомобиле с АБС вы сильно нажимаете на тормоз и не отпускаете ногу, позволяя системе делать свое дело.Когда срабатывает АБС, вы почувствуете пульсацию педали тормоза, а также услышите скрежет или стон. Поскольку теперь шины имеют сцепление, а не скользят, вы также можете управлять автомобилем, если это помогает избежать столкновения, что невозможно, если колеса заблокированы и скользят.
Объявление
Это объявление еще не загружено, но ваша статья продолжается ниже.
Содержание статьи
Электронный контроль устойчивости также работает с антипробуксовочной системой автомобиля.Эта электронная система измеряет скорость вращения колес. Если кто-то вращается быстрее, что может указывать на то, что он на скользкой поверхности, система контроля тяги активирует тормоз на этом колесе, а также может на мгновение снизить мощность двигателя, помогая вращающейся шине восстановить сцепление с дорогой. (Иногда вам нужно немного покрутить колеса, например, когда вы пытаетесь выбраться из глубокого снега, поэтому рекомендуется выключить антипробуксовочную систему, если вы застряли.)
И ABS, и антипробуксовочная система. в первую очередь предназначены для продвижения вперед.Если что-то начинает уходить в сторону, тогда на помощь приходит ESC. Это зависит в первую очередь от трех датчиков, которые измеряют рыскание, скорость колес и угол поворота.
Объявление
Это объявление еще не загружено, но ваша статья продолжается ниже.
Содержание статьи
Датчик рыскания расположен в центре транспортного средства и, как следует из названия, измеряет рыскание — насколько транспортное средство перемещается влево или вправо от своей вертикальной оси. Затем система сравнивает это с углом поворота — направлением передних колес и тем, как далеко вы их повернули.Если вы повернули колеса влево, а машина послушно поворачивает в ту сторону, то все хорошо.
Но если датчики обнаруживают, что ваши колеса повернуты влево, а машина движется вправо, они понимают, что вы заносите боком. Чтобы помочь вам выйти из этого, он использует некоторые или все компоненты из систем ABS и контроля тяги, включая торможение определенных колес и снижение мощности двигателя, чтобы вернуть все в соответствие с направлением колес и вернуть водителя. в управлении автомобилем.Он работает, когда передние или задние колеса теряют сцепление с дорогой и автомобиль начинает заносить. Он постоянно контролирует автомобиль в любых погодных условиях и автоматически включается при необходимости. Его можно временно отключить на некоторых моделях, но он вернется к значению по умолчанию при следующем запуске двигателя.
Объявление
Это объявление еще не загружено, но ваша статья продолжается ниже.
Содержание статьи
Система очень эффективна, и исследования Transport Canada предполагают сокращение на 29 процентов количества аварий, вызванных потерей управления водителями из-за этого.Но он может сделать очень многое, и пока можно только спорить с законами физики. Чтобы обеспечить безопасное вождение, убедитесь, что ваши шины в хорошем состоянии, с достаточным протектором и должным образом накачаны. Меняйте полосу движения постепенно, вместо того, чтобы поворачивать колесо, чтобы переехать. Разгоняйте автомобиль медленно и равномерно, а не резко нажимайте на педаль газа, особенно на скользкой дороге. А если вы попадете на гравий или мягкую поверхность, например, на обочину, не нажимайте на тормоза. Вместо этого медленно отпустите дроссельную заслонку и постепенно возвращайтесь на тротуар.
Поделитесь этой статьей в своей социальной сети
Подпишитесь, чтобы получать информационный бюллетень Driving.ca Blind-Spot Monitor по средам и субботам
Нажимая на кнопку подписки, вы даете согласие на получение вышеуказанного информационного бюллетеня от Postmedia Network Inc. откажитесь от подписки в любое время, нажав на ссылку отказа от подписки внизу наших писем. Postmedia Network Inc. | 365 Bloor Street East, Торонто, Онтарио, M4W 3L4 | 416-383-2300Спасибо за регистрацию!
Приветственное письмо уже готово.Если вы его не видите, проверьте папку нежелательной почты.
Следующий выпуск «Монитора слепых зон» Driving.ca скоро будет в вашем почтовом ящике.
Мы столкнулись с проблемой при регистрации. Пожалуйста, попробуйте еще раз
Комментарии
Postmedia стремится поддерживать живой, но гражданский форум для обсуждения и поощрять всех читателей делиться своим мнением о наших статьях. На модерацию комментариев может потребоваться до часа, прежде чем они появятся на сайте. Мы просим вас, чтобы ваши комментарии были актуальными и уважительными.Мы включили уведомления по электронной почте — теперь вы получите электронное письмо, если получите ответ на свой комментарий, есть обновление в цепочке комментариев, на которую вы подписаны, или если пользователь, на которого вы подписаны, комментарии. Посетите наши Принципы сообщества для получения дополнительной информации и подробностей о том, как изменить настройки электронной почты.
Системы контроля устойчивости автомобиля
Для соблюдения конструкции хорошо настроенного пассивного транспортного средства предлагаемый контроллер не будет стабилизировать транспортное средство во время маневров в установившемся режиме. Так что нет ZSS для всего рабочего диапазона автомобиля.
3.1 Введение в главу
В этой главе будет представлен обзор прошлых исследований, касающихся методов управления моментом рыскания и, в частности, использования управления задним мостом. В этом обзоре будут представлены рекомендации по внедрению заднего рулевого управления в будущую боевую машину 8 × 8. Большинство исследований было проведено на 4-колесном 2-осном автомобиле, однако точки исследования можно интерпретировать как 4-осный автомобиль 8 × 8.
3.2 Системы контроля устойчивости автомобиля
В автомобильной промышленности сегодня крайне маловероятно найти потребительский автомобиль без системы помощи водителю.С момента появления этих систем внимание расширилось, и теперь мы стали уделять больше внимания характеристикам автомобиля, а не только его безопасности. Разработка систем контроля устойчивости происходит от антиблокировочных тормозных систем (ABS) и противобуксовочных систем (TCS), которые помогали поддерживать курсовую устойчивость автомобиля во время аварийных ситуаций. Эти системы ограничивают продольную пробуксовку колес и блокируют их за счет активного управления дроссельной заслонкой и торможения. Когда шины работают в режиме скольжения с максимальным сцеплением, можно достичь кратчайшего тормозного пути и наиболее эффективного времени разгона [1].Дальнейшие разработки были направлены на восстановление устойчивости при движении автомобиля в нежелательном направлении за счет использования электронного контроля устойчивости (ESC). Когда траектория транспортного средства отличается от предполагаемого направления действия водителя, система ESC активирует один из четырех тормозов, чтобы восстановить курсовую устойчивость транспортного средства. В исследовании, проведенном Шведским управлением шоссейных дорог в 2006 г. [2], сделан вывод, что ESC снизила количество аварий с травмами на 13% для всех типов аварий и на 35% для аварий на мокром или обледенелом дорожном покрытии.
Развитие управления транспортными средствами с помощью компьютеров продвинулось от помощи в чрезвычайных ситуациях до улучшения характеристик транспортных средств. Одна из основных задач, направленных на улучшение курсовых характеристик транспортных средств, заключалась в управлении рысканием транспортного средства. В потребительских транспортных средствах используются многие системы, включая дифференциальное торможение, векторизацию крутящего момента, а также активное рулевое управление передней и задней осью. Все эти методы направлены на увеличение или уменьшение момента рыскания транспортного средства, чтобы повысить его характеристики и устойчивость.Также полезно уменьшить угол бокового скольжения транспортного средства, чтобы поддерживать управляемость на поверхности с низким коэффициентом трения, а также поддерживать шины в пределах их рабочего диапазона рулевого управления для создания поперечных сил {Piyabongkarn, 2009 # 450}.
Либманн и др. {Liebemann, 2004 # 453} изучают эффективность программы Bosch Electric Stability Control Program (ESP). Компания Bosch представила ESC миру автомобилестроения в качестве поставщика, впоследствии поставив более 10 миллионов систем в различных конфигурациях автомобилей по всему миру.ESP может быть адаптирована для управления рысканием, а также для ограничения угла бокового скольжения транспортного средства для различных конфигураций транспортных средств с помощью активного управления торможением. Система ESP была адаптирована для предотвращения опрокидывания транспортных средств с более высоким центром тяжести.
3.3 Основные принципы управления рысканием
Рисунок 3‑1 Функционирование системы контроля устойчивости по рысканью {Rajamani, 2011 # 429}
Рыскание транспортного средства описывает поведение транспортного средства при вращении вокруг его вертикальной оси.Что касается характеристик транспортного средства, его поведение относительно рыскания можно использовать для интерпретации предполагаемой траектории транспортного средства относительно намеченной траектории. Применяя систему управления рысканием транспортного средства, можно поддерживать курсовую устойчивость. Теория, лежащая в основе управления рысканием транспортного средства, заключается в управлении моментом, возникающим в результате манипулирования контактом шины с дорогой. Управление скоростью рыскания автомобиля повышает устойчивость автомобиля, а также позволяет ему работать ближе к пределам производительности.
Существует множество различных методов управления рысканием транспортного средства. Все подходы используют одну и ту же теорию, которая увеличивает момент вокруг центра тяжести за счет активного управления поперечными или продольными силами, распространяемыми шинами. Боковой динамикой транспортного средства можно эффективно управлять, вводя в шину угол скольжения или изменяя распределение крутящего момента при движении или торможении.
Системы контроля устойчивости, ориентированные на обратную связь по скорости рыскания, широко используются производителями автомобилей {Sawase, 2006 # 280} {Tseng, 1999 # 451} {Tseng, 1999 # 452} {Liebemann, 2004 # 453} {Hoffman, 1998 # 454}.Контроль рыскания — это эффективный метод удержания контроля над транспортным средством без ущерба для его управляемости. Желаемая скорость рыскания интерпретируется на основе усилия рулевого колеса и скорости транспортного средства и используется в коммерческих транспортных средствах в качестве меры безопасности и позволяет водителю работать ближе к пределам управляемости транспортного средства, не теряя управления.
3.4 Основные принципы контроля бокового скольжения
Боковое скольжение транспортного средства (β) используется для описания угла курса транспортного средства в зависимости от направления его движения.Ограничение угла бокового скольжения транспортного средства позволяет лучше контролировать, поскольку, следовательно, углы скольжения шин ограничены до достижения насыщения {Ahmadi, 2009 # 455}.
Хотя боковое скольжение транспортного средства нелегко точно измерить, существуют дополнительные методы определения угла бокового скольжения динамичного транспортного средства. Разумные оценки бокового скольжения транспортного средства можно оценить по его скорости и боковому ускорению. Более точная оценка может быть получена путем интеграции вектора скорости транспортного средства на основе GPS с вектором скорости транспортного средства из инерциального измерительного блока (IMU).Daily et al. {Daily, 2004 # 456} описывают, что ошибка этого метода в основном связана с ошибкой измерения GPS и может быть исправлена с помощью функции ошибки скорости. Основная проблема с измерениями на основе GPS — ненадежность в средах, где есть высокие объекты.
Piyabongkarn et al. {Piyabongkarn, 2009 # 450} определяет другие методы наблюдения за углом бокового скольжения транспортного средства, включая использование оптических датчиков и оценок на основе динамических моделей. В этой статье также обсуждается новый метод оценки угла скольжения, который использует оценку на основе модели в сочетании с оценкой на основе кинематики.Благодаря экспериментальной реализации, боковое скольжение транспортного средства было эффективно рассчитано и обеспечивает надежную оценку угла бокового скольжения транспортного средства при экстремальных маневрах.
3.5 Вектор крутящего момента
Вектор крутящего момента — это термин для распределения крутящего момента двигателя на ведущие колеса. Если автомобиль поворачивает, внешнее колесо проходит на процент больше, чем внутреннее. Приложив больший крутящий момент к внешним колесам во время поворота, автомобиль с большей вероятностью завершит маневр с большей уверенностью.Такие компании, как Mitsubishi, Ford, Nissan,….
Раннее развитие вектора крутящего момента компанией Mitsubishi motors было направлено на создание «автомобиля, на котором каждый может безопасно водить». Чтобы избежать рулевого управления с тормозом, которое могло бы снизить скорость автомобиля и вступить в конфликт с действиями водителя, компания Mitsubishi разработала систему активного контроля рысканья (AYC), используя «механизм передачи крутящего момента» наряду с уже разработанным активным контролем устойчивости (ASC). Результатом стал дифференциал передачи крутящего момента, который применялся только к задней оси полноприводного автомобиля.В системе использовалась система управления с прямой связью, чтобы улучшить отзывчивость автомобиля, анализируя угол поворота рулевого колеса и положение дроссельной заслонки. Это было связано с управлением обратной связью для отслеживания разницы в поперечной скорости колес. Дополнительные системы могут поддерживать управление во время маневра сноса и регулировать усиление контроллера, оценивая коэффициент поверхностного трения µ. Система позволила достичь более высоких поперечных ускорений за счет использования управления крутящим моментом влево / вправо, улучшив управляемость транспортного средства.При использовании системы ASC управлять автомобилем становится легче, и при достижении контрольных пределов транспортное средство может восстанавливаться. [3]
3.6 Активная помощь при торможении
Торможение — это эффективный метод приложения крутящего момента рыскания для восстановления устойчивости или увеличения скорости рыскания транспортного средства. Многие автомобильные компании могут с легкостью внедрить активную систему помощи при торможении, поскольку она использует то же оборудование, что и ESC, которая является стандартной для всех автомобилей, продаваемых в Северной Америке [4].
Использование тормозного момента для управления рысканием транспортного средства отличается от ESC, основанного на торможении, поскольку для его активации не требуется торможение. Ghike et al. утверждают, что изменение крутящего момента с помощью тормозов менее навязчиво, но более эффективно для управления поперечной динамикой транспортного средства, чем ESC, а также вызывает меньшее снижение скорости [5]. При торможении внутреннего колеса оси с дифференциалом скольжения больший крутящий момент передается на внешнее колесо, обеспечивая требуемое распределение крутящего момента.Как видно на рисунке 2, момент рыскания может быть приложен путем торможения внутренней части
Рисунок 3‑2: Контроль бокового торможения [6]
3.7 Активный ассистент рулевого управления
Активный ассистент рулевого управления описывает систему, которая позволяет компьютерной системе управлять углом поворота рулевого колеса для корректировки поперечной динамики транспортного средства. Эта система также позволяет добавлять полуавтономные системы, такие как ассистент движения по полосе и экстренный ассистент рулевого управления, что полезно, поскольку системы управления имеют более быструю и точную реакцию, чем водитель [7].Активный ассистент рулевого управления позволяет водителю следовать по пути, в то время как регулировка возмущений осуществляется системой управления [8]. Активное рулевое управление также дает некоторые преимущества с точки зрения характеристик транспортного средства, поскольку непрерывное рулевое управление может исправить ошибку водителя, что позволяет с большей уверенностью проверять пределы возможностей устойчивости транспортного средства.
Ютака и др. предложила новую концепцию надежного активного заднего рулевого управления, которая обеспечивает разумную производительность транспортного средства, даже если параметры транспортного средства и / или состояние поверхности изменяются.Использование µ-синтеза
Рисунок 3‑3: Крутящий момент автомобиля при торможении переднего колеса (слева) и рулевого управления передним колесом (справа) [7]
Рисунок 3-4: торможение mu-split — баланс моментов при активном рулевом управлении
Marino et al. использовали контроллер развязки, который имеет обратную связь об ошибке скорости рыскания с зависимым от скорости демпфированием рыскания.
3.8 Рулевое управление задним мостом (RAS)
Управление задней осью — это эффективный метод управления поперечными силами, создаваемыми задними шинами.Использование RAS обычно используется для уменьшения радиуса поворота транспортного средства на низких скоростях при одновременном снижении износа шин и применяется во всех типах транспортных средств, начиная от тяжелых грузовиков, пикапов и даже спортивных автомобилей. Управление задней осью можно использовать на высоких скоростях для уменьшения бокового скольжения автомобиля. Благодаря «управляемому по проводам», используемому для RAS, есть расширенные возможности для улучшения динамической устойчивости транспортных средств. Подобно активному усилителю рулевого управления, активная система заднего рулевого управления может улучшить поперечную динамику автомобиля, только отдельно от углов поворота передних колес.Повышенная динамическая устойчивость становится очень полезной в тяжелых транспортных средствах с высоким центром тяжести в качестве меры предотвращения опрокидывания и увеличения поперечных характеристик транспортного средства. Многие большие грузовики уже включают RAS для улучшения маневренности на низкой скорости, однако Харрази и др. {Харрази, 2008 № 2} предполагают, что необходимы дальнейшие разработки для достижения улучшенной устойчивости транспортного средства к рысканью и отзывчивости, а также улучшенных характеристик на поверхностях с различным поверхностным трением слева направо.
Существует несколько используемых методов управления углами поворота задних осей: Пассивное управление задними колесами может быть реализовано в транспортном средстве с помощью механических средств или методов, которыми водитель не может управлять. Компания Porsche представила заднее рулевое управление с использованием механической навески, называемой осью Weissach, которая уменьшала бы избыточную поворачиваемость, вызывая схождение задней оси {Nalecz, 1989 # 457}. Хотя пассивное рулевое управление не входит в объем данной работы, необходимо оценить методы повышения производительности с помощью механических подходов.Методы упреждающего управления обычно используют входные данные водителя для определения рулевого управления задней оси. В методах управления с обратной связью используются показатели производительности автомобиля для настройки угла поворота задней части автомобиля в соответствии с идеальной моделью вождения автомобиля.
3.9 Методы управления рулевым управлением задних колес с прямой связью
Методы управленияс прямой связью являются эффективным средством получения преимуществ от активного рулевого управления задними колесами путем вывода угла поворота задних колес по отношению к входному рулевому управлению. Знание компоновки транспортного средства и его динамических характеристик может привести к оптимальной настройке контроллера прямой связи.Маневренность на низких скоростях можно легко повысить с помощью контроллера с упреждением, а устойчивость автомобиля не так важна для безопасности на низких скоростях. В исследовании Фурукавы и др. {Furukawa, 1989 # 413} выделяются два метода управления с прямой связью.
Во-первых, это метод контроля нулевого бокового скольжения (ZSS). ZSS учитывает скорость автомобиля и усилие рулевого управления. Эти входные данные используются в передаточной функции, которая была получена путем анализа велосипедной модели транспортного средства с 2 степенями свободы с передним и задним углами поворота.Чтобы удовлетворить часть контроллера с нулевым боковым скольжением, угол бокового скольжения в передаточной функции устанавливается равным нулю, а часть скорости рыскания устраняется, обеспечивая таким образом выигрыш передаточного отношения, зависящий от скорости, для угла поворота задней оси по сравнению с передней осью. .
к = -b-maCrlU2a + mbCflU2
Где a и b представляют собой расстояние между передней и задней осями до центра тяжести, соответственно,
— это колесная база транспортного средства, C f и C r — жесткость передних и задних шин при повороте соответственно, а U — скорость транспортного средства.Это приводит к соотношению, представленному на Рисунке 3-5.
Рисунок 3‑5 Зависимость от скорости нулевого бокового скольжения (ZSS) Передаточное отношение передней части к задней части
Второй метод, рассмотренный Furukawa et al. является зависимостью исключительно от угла поворота рулевого колеса. При малых входных углах поворота задние колеса поворачиваются в том же направлении, что и передние. Для больших углов поворота, которые чаще возникают на низкой скорости, поверните задние колеса напротив передних колес для повышения маневренности.Эта система позволяет улучшить рулевое управление с низкой и высокой скоростью без необходимости обновлять скорость автомобиля в контроллере. Система RAS, зависящая от угла поворота, показана на Рисунке 3‑6.
Рисунок 3‑6 Зависимость от угла поворота, RAS {Furukawa, 1989 # 413}
Исследование Fukunada et al. {Fukunaga, 1987 # 458} по алгоритму прямой связи Nissan, аналогичному ZSS
.Харрази и др. [9] наблюдали эффективность управления задней осью на устойчивость к рысканью и реакцию тяжелого грузовика с помощью MATLAB-Simulink и на полномасштабном грузовике Volvo.Система управления ориентирована на торможение с раздельным торможением и маневры на высокой скорости в качестве мер для анализа управления автомобилем. Контроллер управляет задней осью, чтобы удовлетворить действия водителя или контрольную скорость рыскания. Контроллер высокоскоростного рулевого управления состоит из упреждающей обратной связи первого порядка и пропорциональной обратной связи:
δ3 = KFF-TFFsδ1 + KFB (rref-r)
Контроллер торможения split-mu использует контроллер с упреждающей передачей пропорционального усиления для поворота задней оси для компенсации неравномерного тормозного усилия слева и справа.Это уменьшает тормозной путь, позволяя системе ABS работать на полную мощность, не заставляя водителя противодействовать повороту. Контроллер можно описать как:
δ3 = КПМ тормоз
Моделирование и полные испытания автомобиля показывают, что ошибка скорости рыскания может быть уменьшена на 64% при одновременном уменьшении усилий, необходимых для водителя. Контроллер торможения split-mu с использованием RAS может сократить тормозной путь как минимум на 10% за счет использования более агрессивной системы ABS и RAS для поддержания того же уровня активности водителя, который необходим для стандартного автомобиля.
Nagai et al. {Nagai, 1997 # 443} использовал контроллер согласования моделей (MMC), который применяет обратную связь по состоянию как по скорости рыскания, так и по углу бокового скольжения транспортного средства, чтобы помочь транспортному средству следовать идеальной динамической траектории. Метод MMC использует теорию линейного управления, но доказал свою эффективность в улучшении управляемости и устойчивости автомобиля даже при изменении его параметров. Надежность контроллера чрезвычайно важна для боевой машины, поскольку масса машины и жесткость на поворотах меняются в зависимости от местности и назначения машины.
3.10 Разработка моделирования {РАЗДЕЛ МОДЕЛИРОВАНИЯ]
Сплит-му торможение
Чтобы проверить эффективность контроллера торможения с раздельным управлением, Харрази и др. использовали mu_left = 0,15 и mu_right как 0,75 и начальную скорость 50 км / ч. [9]
Высокоскоростной поворот
Радиус поворота
НАТО Переулок
Устойчивость к нелинейности шин и состоянию дороги
Для оценки устойчивости контроллера к нелинейным характеристикам шин и дорожным условиям Nagai et al.протестировали переходную реакцию на разные углы поворота рулевого колеса (от 15 до 45 градусов) при различных значениях сцепления с дорогой (mu = 0,8, 0,6, 0,4). В тесте использовался синусоидальный управляющий сигнал с одним периодом, равным 2 секундам. Посмотрев реакцию скорости рыскания на входное значение угла поворота, выходной сигнал контроллера можно оценить по сравнению с желаемым выходным сигналом.
Артикул:
[1] У. Кинке и Л. Нильсен, Автомобильные системы управления: для двигателя, трансмиссии и транспортного средства : Springer-Verlag New York, Inc., 2000.
[2] А. Ли, К. Тингвалл, М. Краффт и А. Куллгрен, «Эффективность электронного контроля устойчивости (ESC) в снижении количества аварий и травм в реальной жизни», Предупреждение дорожно-транспортного травматизма, том. 7. С. 38-43, 2006.
[3] К. С. Савасе, Йошиаки, «Применение активного контроля рыскания к динамике транспортного средства за счет использования движущей / тормозной силы», JSAE Review, vol. 20, pp. 289-295, 1999.
[4] Н. Х. Т. С. А. (НАБДД), «Электронные системы контроля устойчивости», в Федеральных стандартах безопасности транспортных средств vol.126-49 CFR Parts 571 & 585, ed, 2007.
[5] К. Гике, Т. Шим и Дж. Асгари, «Интегрированное управление приводом колес и тормозным моментом для улучшения управляемости автомобиля», Труды Института инженеров-механиков, Часть D: Журнал автомобильной инженерии, об. 223, стр. 439-457, 2009.
[6] К. У. Савасе, Юичи; Миура, Таками; «Технология векторизации крутящего момента влево-вправо как основа системы Super All Wheel Control (S-AWC)», Технический обзор Mitsubishi, 2006.
[7] Дж. Акерманн, д-р Т. Б. Унте и Д. Оденталь, «Преимущества рулевого управления Actve для управления динамикой автомобиля», 1999 г.
[8] Дж. Акерманн и Т. Бюнте, «Подавление помех от рыскания за счет надежной развязки рулевого управления автомобиля», Control Engineering Practice, vol. 5. С. 1131-1136, 1997.
.[9] С. Харрази, М. Лидберг, П. Лингман, Ж.-И. Свенссон и Н. Дела, «Эффективность управления задним мостом для устойчивости к рысканью и отзывчивости тяжелого грузовика», Vehicle System Dynamics, vol.46, pp. 365-372, 2008.
.Car Tech: контроль тяги и электронный контроль устойчивости
Добавлено 25 августа, 2016 Колесо новостей определений, электронный контроль устойчивости, пояснения, контроль устойчивости, контроль тягиКомментариев нет
Это правда, что контроль устойчивости — это контроль тяги, но знаете ли вы, что контроль тяги не обязательно является контролем устойчивости?
Фото: © Найл Кеннеди
Если у вас есть автомобиль, грузовик или внедорожник, выпущенный в 2012 году или позже, скорее всего, вы видели кнопку трекшн-контроля или электронного контроля устойчивости (ESC) на своем автомобиле и задавались вопросом, что на самом деле делает эта технология.
Для начала важно знать, что между антипробуксовочной системой и электронным контролем устойчивости есть существенные различия.
Система контроля тяги использует датчики, чтобы определить, когда одно колесо вращается быстрее другого. Это иногда случается на мокрой или обледенелой дороге, когда одно колесо теряет сцепление с дорогой и начинает быстро вращаться, в то время как другое колесо продолжает вращаться обычным образом; это может привести к пробуксовке автомобиля. Контроль тяги помогает предотвратить это, используя свои датчики, чтобы определить, вращается ли одно колесо быстрее, чем соответствующее колесо.Затем эта технология может снизить мощность двигателя или даже задействовать тормоза, чтобы колесо снова приобрело сцепление с дорогой.
Топливо для размышлений: Узнайте, в чем разница между полным и полным приводом
Проще говоря, электронный контроль устойчивости — это гораздо более продвинутая форма контроля тяги. Впервые она была представлена Mercedes в 1990-х годах, и эта технология оказалась настолько эффективной в снижении количества дорожно-транспортных происшествий, что федеральное правительство обязало ее стать стандартной функцией безопасности для всех автомобилей, начиная с 2012 года.Фактически, правительственные исследования показывают, что контроль за стабильностью ежегодно спасает более 9 500 жизней. Более того, Страховой институт дорожной безопасности (IIHS) также заявил, что, если бы эта технология безопасности была доступна с самым первым автомобилем, можно было бы избежать примерно одной трети всех смертельных автомобильных аварий.
Электронный контроль устойчивости на самом деле представляет собой компьютеризированную систему управления, которая использует несколько датчиков, чтобы помочь транспортным средствам двигаться прямо и избегать аварий.Датчики, используемые в системе контроля устойчивости, включают акселерометр, датчик угла поворота рулевого колеса, датчики скорости вращения колес, гидравлический модулятор, модуль управления и датчик скорости рыскания.
Некоторые опытные водители отключают электронный контроль устойчивости, но это не рекомендуется для новичков.
Фото: © SuperCar-RoadTrip.fr
Используя эти шесть датчиков, система контроля устойчивости может помочь выпрямить транспортное средство, скользящее по дороге, покрытой снегом или дождем, путем измерения предполагаемого водителем пути на основе угла поворота рулевого колеса, а затем сравнения этого с направлением, которое автомобиль действительно путешествует.Это определяется положением и скоростью каждого колеса автомобиля. Если компьютерная система обнаруживает несоответствие между предполагаемым курсом водителя и фактическим направлением движения транспортного средства, то сигнал может быть отправлен в гидравлический блок, который затем может задействовать тормоза на одном, двух или трех колесах, как а также уменьшить мощность двигателя, чтобы направить автомобиль в правильном направлении. Таким образом, хотя противобуксовочная система может ограничить пробуксовку колес и уменьшить некоторые типы заносов, она не может влиять на управление автомобилем или обеспечивать тот же тип безопасности, что и электронный контроль устойчивости.
Некоторые автолюбители отключают свои системы контроля устойчивости, когда посещают трек на выходных, но Джек Барут из Road и Track предостерегает от такой практики. По словам Барута, многие автомобили достигают максимально возможного времени прохождения круга на две-три секунды с включенной системой ESC, и нет смысла отключать передовую технологию, предназначенную для предотвращения аварии. Тем не менее, некоторые люди все равно делают это, потому что считают, что технология ESC ограничит их удовольствие на трассе.
Электронный контроль устойчивости также упоминается как динамический контроль транспортного средства (VDC), система стабилизации транспортного средства StabiliTrak (VSA), электронная программа стабилизации (ESP), AdvanceTrac с контролем устойчивости к качению, динамический контроль устойчивости (DSC) и контроль устойчивости транспортного средства (VSC). ).
Как бы каждый автопроизводитель ни называл свою систему контроля устойчивости, обычно рекомендуется не выключать ее, поскольку многие организации, занимающиеся вопросами безопасности, считают контроль устойчивости самым важным достижением в области автомобильной безопасности после ремня безопасности.
Скоро вы отправитесь в Огайо? Посмотрите эти веселые семейные мероприятия, проводимые в штате Бакай
Видео: раскрытие электронного контроля устойчивости (ESC)
Источник новостей: Road and Track
The News Wheel — это цифровой автомобильный журнал, предлагающий читателям свежий взгляд на последние автомобильные новости. Мы находимся в самом сердце Америки (Дейтон, штат Огайо), и наша цель — предоставить интересную и информативную картину тенденций в автомобильном мире.Смотрите другие статьи в «Колесе новостей».
Стратегия контроля устойчивости транспортного средства, основанная на распознавании намерения водителя поворачивать для двухмоторного электромобиля
Система контроля устойчивости транспортного средства должна точно интерпретировать намерение вождения и гарантировать, что фактическое состояние транспортного средства максимально соответствует желаемому состоянию. В этом документе предлагается стратегия управления устойчивостью транспортного средства, которая основана на распознавании намерения водителя поворачивать для электромобиля с двойным приводом.Гибридная модель, состоящая из нейронной сети со скрытой марковской смесью Гаусса (GHMM) и обобщенного растущего и сокращающего RBF (GGAP-RBF), построена для распознавания намерения поворачивания драйвера в реальном времени. Коэффициент срочности поворота, который вычисляется на основе результатов распознавания, используется для создания модифицированной эталонной модели для контроля устойчивости транспортного средства. Затем верхний контроллер системы контроля устойчивости транспортного средства строится с использованием теории прогнозирующего управления линейной модели.Минимум квадратичной суммы рабочей нагрузки шины транспортного средства принимается в качестве цели оптимизации. Состояние сцепления шины с дорогой, характеристики двигателя и тормозной системы, а также состояние двигателя принимаются в качестве ограничений. Кроме того, для системы контроля устойчивости транспортного средства установлен нижний контроллер с задачей оптимизации распределения дополнительного момента рыскания. Наконец, были проведены испытания транспортных средств путем проведения экспериментов по замене двух полос движения и одной полосы движения на платформе для электромобилей с двумя двигателями с использованием виртуального контроллера оборудования A & D5435.Результаты показывают, что система контроля устойчивости функционирует надлежащим образом с использованием этой стратегии управления и эффективно улучшает устойчивость транспортного средства.
1. Введение
Контроль устойчивости транспортного средства, который основан на антиблокировочной тормозной системе (ABS) и системе контроля тяги (TCS) транспортного средства, играет важную роль в предотвращении аварий с участием одного транспортного средства, вызванных неустойчивостью транспортного средства [1]. Механическая конструкция, динамические характеристики, характеристики отклика и сложность привода электромобиля с двумя двигателями значительно отличаются от таковых у автомобиля с одним приводом.Следовательно, электромобили с двойным приводом также нуждаются в эффективной и стабильной системе контроля устойчивости.
В зависимости от структуры системы используются два типа контроллеров системы устойчивости автомобиля: централизованный и иерархический. По сравнению с централизованным контроллером, иерархическая система контроллеров имеет превосходную расширяемость и отказоустойчивость, а также обеспечивает более удобное обслуживание и отладку системы [2, 3]. Кроме того, гораздо более высокий уровень интеграции шасси электрификации транспортного средства позволяет реализовать координационное управление с другими системами, такими как система управления X и системы активной безопасности, например.g., электрическое управление торможением (ECB), электрическое распределение тормозного усилия (EBD) и активное переднее рулевое управление (AFS).
На основе текущего состояния транспортного средства и намерения водителя верхний уровень иерархического контроллера устойчивости транспортного средства принимает решение относительно дополнительного момента рыскания для восстановления стабильного состояния транспортного средства. Чжан и Ван предложили систему контроля устойчивости транспортного средства, использующую управление обобщенной пропорциональной интеграцией (PI) [4]. Wang et al. разработала стратегию управления устойчивостью на основе ПИД-регулятора с интегральным разделением, чтобы исключить интегральное накопление в системе управления [5].Zhao et al. разработали систему контроля устойчивости транспортного средства на основе нечеткой модели T-S [6, 7]. Некоторые ученые также приняли надежный контроль, чтобы улучшить влияние неопределенных факторов, таких как потери в системе, колебания нагрузки на шины и боковой ветер [8–12]. Однако алгоритм PID не гарантирует ни оптимального управления системой, ни ее устойчивости управления. Правила нечеткого управления устанавливаются на основе большого количества экспериментов и экспертного опыта и должны корректироваться в соответствии с условиями вождения, что требует больших временных и экономических затрат.Наиболее заметным недостатком управления режимом слайда является дребезжание, которое возникает, когда система приближается к поверхности режима слайда, и которое можно только уменьшить, но не устранить. Управление с прогнозированием модели (MPC) может напрямую учитывать ограничения привода и ограничения состояния системы во время проектирования контроллера. Кроме того, MPC может эффективно управлять многокритериальной системой с ограничениями в сложных инженерных системах и обладает высокой мобильностью [13]. Джалали и др. предложил контроллер устойчивости транспортного средства с использованием MPC [14–17].И желаемая скорость рыскания и угол бокового скольжения были получены через угол поворота рулевого колеса водителя.
Нижний уровень контроллера устойчивости транспортного средства выбирает соответствующий привод и перераспределяет дополнительный момент рыскания на основе определенных правил. В настоящее время наиболее часто используемый метод основан на двух стратегиях распределения: на основе правил и на основе теории оптимизации [18]. Увеличение количества приводов и растущая сложность электронных систем управления транспортными средствами привели к усложнению правил распределения; следовательно, точность распределения не может быть гарантирована в той же степени, что и раньше.Следовательно, стратегия распределения, основанная на теории оптимизации, является более подходящей.
Стратегия распределения, основанная на теории оптимизации, обычно принимает в качестве целей оптимизации скорость скольжения шины, минимум суммы рабочей нагрузки шины и минимум суммы продольной силы шины. В то же время постепенно выдвигается стратегия оптимизации с учетом отказа актуатора и экономии энергии. Инь предложил стратегию распределения дополнительного момента рыскания и тягового усилия с целью минимизации нагрузки на шины [19].Zhai et al. предложили стратегию распределения среднего крутящего момента, стратегию распределения крутящего момента на основе динамической нагрузки шины и стратегию оптимального распределения крутящего момента на основе минимальной целевой функции для управления крутящим моментом двигателя или рекуперативным тормозным моментом для повышения устойчивости транспортного средства [20]. Park et al. предложил стратегию распределения крутящего момента, которая учитывает экономику вождения, потребность водителя в ускорении и проскальзывание шин, и использовал нечеткую логику для выбора подходящей стратегии распределения [21].Ким и Ким выбрали рекуперативное торможение и электрогидравлический тормоз в качестве исполнительных механизмов в контроллере устойчивости автомобиля. Стремясь минимизировать потребление энергии EHB, было оптимизировано соотношение распределения тормозных сил между передней и задней осями [22].
Согласно вышеупомянутым исследованиям, иерархический контроллер устойчивости транспортного средства получает желаемое состояние вождения, используя угол поворота рулевого колеса водителя. Однако углубленное исследование показало, что использование только угла поворота рулевого колеса неадекватно, чтобы выразить намерение водителя и получить контроллер устойчивости транспортного средства в желаемом состоянии вождения.
Намерение поворота водителя инициируется на основе опыта в зависимости от состояния дороги, окружающей среды и состояния транспортного средства. Затем водитель манипулирует приводом транспортного средства таким образом, чтобы транспортное средство реагировало в соответствии с их намерением. Таким образом, намерение водителя повернуть отражает его субъективную потребность в состоянии автомобиля. Когда водители совершают резкие повороты, такие как непрерывный S-образный поворот, крутой поворот и другие дороги с меньшим радиусом кривизны, а также при экстренном объезде препятствий или внезапном обгоне, считается, что водитель намеревается быстро маневрировать. в текущих дорожных условиях, что также означает, что у водителя есть определенные ожидания в отношении скорости рыскания и бокового скольжения автомобиля.Однако для некоторых водителей из-за ограничений, таких как их опыт вождения, условия вождения, теоретические знания и другие факторы, это ожидание игнорирует правильную оценку устойчивости транспортного средства при боковом движении. Если в процессе контроля устойчивости транспортного средства существует значительная разница между фактическим и ожидаемым состоянием транспортного средства, водитель продолжит операцию поворота, и устойчивость транспортного средства ухудшится и даже заставит водителя не доверять системе.
Следовательно, точная интерпретация и прогнозирование намерения вождения в процессе контроля устойчивости транспортного средства и обеспечение того, чтобы фактическое состояние транспортного средства поддерживалось как можно ближе к ожидаемому состоянию транспортного средства, значительно улучшили бы стабильность и безопасность движения транспортного средства. Намерение водителя может быть получено с помощью нечетких рассуждений, машины опорных векторов (SVM), искусственной нейронной сети (ANN) и скрытой марковской модели (HMM) [23–27]. Нечеткое мышление, SVM и ИНС используются для распознавания намерений водителя в определенный момент.Однако нейронная сеть и нечеткая логика затрудняют работу с информацией, упорядоченной во времени. Таким образом, они в основном используются для задач статического распознавания. HMM, как своего рода метод динамической обработки информации, основанный на кумулятивной вероятности временного ряда, рассматривает только последовательность состояний с максимальной логарифмической вероятностью и игнорирует возможность событий с малой вероятностью. Поэтому с помощью HMM трудно распознать легко сбивающиеся с толку намерения.
Весь приведенный выше анализ побудил нас разработать метод определения намерения водителя поворачивать, установить коэффициент срочности поворота при резком повороте и предложить эталонную модель контроля устойчивости транспортного средства, учитывающую намерение водителя поворачивать.Основываясь на вышеупомянутых результатах, мы предложили стратегию контроля устойчивости электромобиля с двойным приводом. В результате этого исследования желаемая цель управления устойчивостью больше не зависит только от угла поворота рулевого колеса, а состояние транспортного средства в соответствии с намерением вождения в определенной степени находится под контролем. Эта статья организована следующим образом. Метод определения намерения водителя поворачивать представлен в Разделе 1. Модифицированная эталонная модель устойчивости транспортного средства, учитывающая намерение водителя поворачивать, представлена в Разделе 2.Построение стратегии управления устойчивостью транспортного средства на основе модифицированной эталонной модели обсуждается в разделе 3. В разделе 4 сравнивается стратегия управления устойчивостью транспортного средства, основанная на модифицированной эталонной модели, построенной в этой работе, с традиционной стратегией. Наконец, в разделе 5 представлены выводы этого исследования.
2. Гибридная модель распознавания намерения водителя для нейронной сети GHMM и GGAP-RBF
Операция поворота — это сложное событие, которое продолжается в течение определенного периода времени.Последовательность наблюдения за процессом поворота представляет собой набор временных данных. Гауссовская скрытая марковская модель (GHMM) демонстрирует сильные возможности моделирования для динамических временных последовательностей. Однако модель не учитывает перекрытия между разными классами, и это серьезное ограничение. Напротив, обобщенный рост и сокращение RBF (GGAP-RBF), инженерная модель, может имитировать механизм мышления человеческого мозга, обладает сильными способностями классификации и принятия решений и может описывать недостоверную информацию.Таким образом, он компенсирует недостатки HMM. Кроме того, модель позволяет удалять незначительные нейроны в каждом цикле итеративного обучения, чтобы эффективно контролировать рост нейронной сети и упростить структуру сети с большой емкостью данных. Однако способность GGAP-RBF описывать динамические последовательные процессы не особенно сильна [28–30]. Это привело нас к созданию гибридной модели в виде нейронной сети GHMM / GGAP-RBF. Учитывая преимущества построения последовательной модели и ее способность к нелинейному отображению, гибридная модель может получать вновь идентифицированную информацию, тем самым значительно повышая точность классификации классов с небольшими различиями [27].В то же время, чтобы улучшить характеристики в реальном времени, эта работа использует начальную стадию операции поворота, чтобы определить намерение водителя поворачивать.
Структура системы распознавания намерения водителя поворачивать на основе гибридной модели GHMM / GGAP-RBF показана на рисунке 1. Гибридная модель включает нижний уровень (модель GHMM) и верхний уровень (модель GGAP-RBF). . Нижний слой модели включает GHMM точения и GHMM нормального точения. Скорость автомобиля, угол поворота рулевого колеса, угловая скорость рулевого колеса и крутящий момент рулевого колеса являются входными данными нижнего уровня.Логарифмическая вероятность резкого поворота GHMM и нормального поворота GHMM являются выходными данными нижнего уровня. На основе данных начальной стадии точения GHMM нормального точения и точения проектируются и обучаются с использованием алгоритма Баума – Велча для расчета наиболее вероятной последовательности состояний. Кроме того, для вычисления логарифмической вероятности GHMM используется прямой алгоритм.
На верхнем уровне логарифмическая вероятность GHMM, скорость рыскания транспортного средства и поперечное ускорение образуют вектор.Нелинейная комбинация этого вектора рассматривается как входной сигнал нейронной сети GGAP-RBF, а способность нейронных сетей к нелинейному отображению используется для распознавания фактического намерения водителя поворачивать.
2.1. Создание модели GHMM
Параметры характеристик гибридной модели GHMM / GGAP-RBF оказывают значительное влияние на точность распознавания намерения водителя поворачивать. Алгоритм ReliefF используется для сбора соответствующих параметров.В этом исследовании угол поворота рулевого колеса, угловая скорость рулевого колеса и крутящий момент рулевого колеса используются в качестве параметров характеристик для распознавания намерения водителя рулевого управления. Исходя из начального этапа токарной операции, ГГМД для точения и обычного точения устанавливаются отдельно. Последовательность наблюдения GHMM может быть описана как многомерный вектор [31]: где — угол поворота рулевого колеса, — крутящий момент на рулевом колесе, — угловая скорость рулевого колеса.
Алгоритм Баума – Велча используется для оптимизации трех параметров GHMM, которые описываются как, где — распределение начального состояния, A — матрица вероятности перехода между состояниями, а B — функция плотности вероятности.
Функция плотности вероятности модели находится где — j -мерная плотность вероятности Гаусса состояния i , — последовательность наблюдений, — среднее значение функции Гаусса и — ковариация функции Гаусса.
Предполагая, что это вероятность j -й гауссовой функции смеси в последовательности наблюдения состояния во время, вероятность того, что цепь Маркова находится в состоянии во время, будет следующей: где — средняя матрица функции гауссовой смеси, — матрица смешанной ковариации, — вес выходных вероятностей различных функций гауссовой смеси.На основе модели смеси Гаусса переоценка параметров выглядит следующим образом:
После оптимизации параметров GHMM соответствие между собранными данными и GHMM вычисляется с использованием алгоритма прямого-обратного.
2.2. Создание нейронной сети GGAP-RBF
Чтобы гарантировать, что события с малой вероятностью также могут произойти, функция (5) больше не используется для распознавания намерения поворота. Вместо этого намерение поворота описывается как функция логарифмической вероятности двух GHMM с учетом тестовых данных (и), скорости рыскания транспортного средства и бокового ускорения, выраженных следующим образом:
Входной параметр входного слоя: , и, как показано в уравнении (7).Результатом слоя является намерение водителя повернуть, как показано в уравнении (8): где,, и представляют собой стандартизацию отклонения,,, и; является центром RBF k -го нейрона; и — стандартное отклонение функции Гаусса, которое указывает ширину функции Гаусса.
После –-й итерации обучения RAN используется для оптимизации роста нейронов. Параметры нейрона при добавлении нового нейрона задаются следующим образом [32–35]: где — вес, соединяющий новый нейрон с выходным нейроном; центр нового нейрона; ширина нового нейрона; — ошибка априорной оценки; — коэффициент перекрытия, определяющий перекрытие ответов скрытых нейронов во входном пространстве; и — значение центра ближайшего к ней скрытого нейрона.
Стоимость нового нейрона оценивается с использованием условий неравенства (10). Если условия соблюдены, новые данные обучения ценны для сети, и производительность сети эффективно улучшается за счет нового нейрона. В результате добавляется новый нейрон и принимаются данные обучения. В противном случае обучающие данные и новый нейрон отклоняются. Где и являются порогом расстояния и ошибки, соответственно; — значение ближайшего к ней центра скрытого нейрона; — погрешность априорной оценки.
Затем следует оценить незначительный нейрон и удалить его с помощью алгоритма отсечения. Среднеквадратичная ошибка вывода прогноза после того, как нейрон k -й удален из сети в i -й итерации обучения следующим образом: где — гауссовский RBF, — время обучения, — норма, и — k -й скрытый нейрон.
Входные данные RBF,,, и следуют нормальному распределению выборки, соответственно. Диапазон выборки обучающих данных i -го составляет X , который разделен на равные небольшие части.При стремлении к бесконечности сумма по диапазону выборки становится приблизительно равной интегральному значению. Где E sig ( k ) — значимость k -го нейрона в сети, что означает вклад этот нейрон ко всей сети и является функцией распределения вероятностей. Если E sig ( k ) меньше точности обучения e min , нейрон считается несущественным и удаляется.В противном случае нейрон имеет значение и должен быть сохранен. Поскольку незначительные нейроны могут быть удалены из нейронной сети GGAP-RBF, размер сети может быть ограничен разумным диапазоном.
2.3. Создание модели GHMM / GGAP-RBF
Создание модели GHMM / GGAP-RBF требует автономного обучения с использованием тестовых данных, которые были получены в реальных экспериментах с транспортным средством.
Опыт вождения, пол и личность могут повлиять на принятие решения водителем. Чтобы исключить влияние водителей на результаты тестов, выбраны три водителя с разным стажем вождения.Согласно анализу технических условий на проектирование муниципальных дорог (CJJ37-2012), технических условий на проектирование взаимодействий на городских дорогах (CJJ152-2010) и метода испытаний на устойчивость при управлении транспортными средствами (GB / T6323-2 2014), радиус поворота тестовая дорога установлена на 10 м, 25 м, 40 м и 60 м. Радиус поворота тестовой дороги установлен в 10 м, 25 м, 40 м и 60 м. И скорость испытаний установлена на 20 км / ч, 30 км / ч и 40 км / ч. Чтобы отличить прямое движение от поворота, тесты по прямому движению также проводятся на скоростях 20 км / ч, 30 км / ч и 40 км / ч.Распределение данных испытаний показано в таблице 1.
Параметры автомобиля приведены в таблице 2.Из-за шума в данных датчика, собираемых прибором сбора данных, данные должны быть предварительно обработаны. T -тестирование используется для удаления аномальных данных. Затем метод смешанной гауссовой кластеризации используется для извлечения данных, относящихся к начальной стадии токарной операции, как части всего процесса токарной обработки. Эти предварительно обработанные данные можно разделить на две части. 75% тестовых данных используются для автономного обучения модели, а остальные используются для онлайн-проверки модели.После автономного обучения можно было получить матрицу начального состояния, матрицу перехода состояний, вес каждой гауссовой функции в GHMM, среднее значение и ковариацию каждой гауссовой функции и параметры GGAP-RBF.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||