Какие датчики в современном автомобиле: принцип работы и признаки неисправности
Датчик массового расхода воздуха (ДМРВ)
Назначение ДМРВ
Датчик массового расхода воздуха (сокр. ДМРВ) предназначен для преобразования расхода воздуха, поступающего в двигатель, в напряжение постоянного тока.
Информация датчика позволяет определить режим работы двигателя и рассчитать цикловое наполнение цилиндров воздухом на установившихся режимах работы двигателя, длительность которых превышает 0,1 секунды.
Принцип действия ДМРВ
Чувствительный элемент датчика построен на принципе терморезистивного анемометра и выполнен в виде платиновой нагреваемой нити. Нить нагревается электрическим током, а с помощью термодатчика и схемы управления датчика ее температура измеряется и поддерживается постоянной.
Если через датчик поток воздуха увеличивается, то платиновая нить начинает охлаждаться, схема управления датчика увеличивает ток нагрева нити, пока температура ее не восстанавливается до первоначального уровня, таким образом, величина тока нагрева нити пропорциональна расходу воздуха.
Вторичный преобразователь датчика преобразует ток нагрева нити в выходное напряжение постоянного тока.
Проблемы эксплуатации ДМРВ
С течением времени нить загрязняется, что приводит к смещению градуировочной характеристики датчика.
Для очистки нити от грязи после выключения двигателя (при выполнении определенных условий) нить прожигается до 900—1000°C импульсом тока в течении 1 секунды. Импульс управления прожигом формирует блок управления.
Очистка ДМРВ
Для промывки никак нельзя использовать кетоны и эфиры по трём причинам:
- Растворяют компаунд.
- При высыхании очень сильно охлаждают кристалл. Он может «лопнуть\треснуть».
- Растворяют «маску» на кристалле (это относительно не страшно, но в центре кристалла есть полимерная плёнка в окошке, похоже из полиэтилентерефталата, на которой тоже маска и металлическое напыление) Плёнка выдержит, но если маска смоется, плёнка деформируется и оторвётся.
Также категорически не рекомендуется:
- лазить туда спичками\зубочистками и т.д.
- промывать агрессивными или едкими жидкостями типа Виннса и Карбоклина.
- Большинство растворителей карбовые очистители «Абро» и «Hi-Gear».
- ВЭЛВовские аэрозоли содержат ацетон (про кетоны написано выше) и этиловый эфир ¬- их не использовать.
В общем, что остаётся для очистки?
WD-40. Там «соляра» и тяжёлые жирные кислоты. Моют хорошо, но надолго оставляют плёнку. Её надо смывать. Смывать нужно спиртами (этил / метил / изопропил) в смеси с дистиллированной водой (20% воды), или этил / бутил / пропил — ацетатами (Ч.Д.А.). Они с водой нормально смешиваются (но хозтоварные грязные, и оставляют налёт). Думаю, что лучше кристалл поливать из шприца с тонкой иголкой. А сушить «родным» вентилятором, включив его с компьютера. Ну, по крайней мере, искусственной смертью он не умрёт, а от естественной никто не застрахован. Хорошие результаты по промывке ДМРВ дает обычная промывка изопропиловым спиртом с предварительно разогретым, с помощью технического фена, до 60-70 градусов ДМРВ и промывочной жидкости.
Как продлить жизнь ДМРВ:
- Свовременная замена воздушного фильтра.
- Переодическая чистка корпуса воздушного фильтра и по возможности его патрубков.
- НЕ использование спортивных (нулевых) воздушных фильтров (особенно с пропитками).
Датчик положения дроссельной заслонки (ДПДЗ)
Датчик положения дроссельной заслонки установлен сбоку на дроссельном блоке на одной оси с приводом дроссельной заслонки. Датчик положения дроссельной заслонки считывает показания с положения педали «газа». Основной враг датчика положения дроссельной заслонки — мойщики двигателей.
Срок службы датчика положения дроссельной заслонки совершенно непредсказуем.
Нарушения в работе датчика положения дроссельной заслонки проявляются в повышенных оборотах на холостом ходу, в рывках и провалах при малых нагрузках.
Датчик детонации (ДД)
Датчик детонации установлен на блоке двигателя между вторым и третьим цилиндрами. Существуют два типа датчика детонации – резонансный (внешне как бочонок) и широкополосный (как таблетка). Датчики детонации разных типов не взаимозаменяемы.
Датчик детонации — это надежный элемент, но требует регулярной чистки разъема. Принцип работы датчика детонации основан на пьезоэлектрическом эффекте (как у пьезозажигалки). Чем сильнее удар, тем больше напряжение.
Отслеживает детонационные стуки двигателя. В соответствии с сигналом датчика детонации контроллер устанавливает угол опережения зажигания. Есть детонация — более позднее зажигание. Отказ или обрыв датчика детонации проявляются в «тупости» мотора и повышенному расходу топлива.
Он представляет собой пустотелый шестигранный корпус с резьбовым выступом для вкручивания в ДВС. Внутри корпуса обычным винтиком прикручивается двухслойный пьезоэлемент, который и вырабатывает ЭДС при воздействии на него колебаний звуковой частоты через корпус датчика.
Эти колебания с помощью пьезоэлемента преобразуются в аудиосигнал. Таким образом, с помощью ДД блок EFI «слышит», что происходит в двигателе во время его работы. То есть, это своеобразный микрофон, а точнее, пьезокерамический звукосниматель (как на проигрывателях виниловых пластинок).
Корпус по край залит специальным компаундом, по ощущению напоминающий хрупкую крошащуюся искусственную резину. Этот компаунд (на форуме его называют «смолой») не только защищает пьезоэлемент от воздействия окружающей среды, но еще и создаёт специфическую АЧХ (амплитудно-частотную характеристику) сигнала, так как спектр ДД должен лежать в области 1400-6000Гц с центральной частотой в районе 2700Гц (примерная частота детонации).
Если появляются детонационные процессы, то блок EFI автоматически изменяет угол опережения зажигания (УОЗ) до тех пор, пока детонационные процессы не сведутся к минимуму или вообще не ликвидируются.
Таким образом, ДД является неотъемлемой частью цепей коррекции формирования и наиболее эффективного сжигания топливной смеси. Выход из строя ДД сопровождается появлением ошибки самодиагностики, детонационными процессами в ДВС (при этом характерным так называемым «звоном пальцев»), худшей тягой, повышенным расходом топлива.
Датчик давления масла
Давление масла в системе контролируется специальным датчиком, установленным в масляной магистрали. Электрический сигнал от датчика поступает к контрольной лампе на приборной панели. На автомобилях также может устанавливаться указатель давления масла.
Датчик давления масла может быть включен в систему управления двигателем, которая при опасном снижении давления масла отключает двигатель.
На современных двигателях устанавливается датчик контроля уровня масла и соответствующая ему сигнальная лампа на панели приборов. Наряду с этим, может устанавливаться датчик температуры масла.
Датчик температуры охлаждающей жидкости (ДОЖ)
Датчик температуры охлаждающей жидкости установлен между головкой блока и термостатом. Датчик температуры охлаждающей жидкости имеет два контакта. Основное функциональное назначение датчика температуры охлаждающей жидкости — чем холоднее мотор, тем богаче топливная смесь.
Конструктивно датчик температуры охлаждающей жидкости представляет собой термистор (резистор), сопротивление которого изменяется в зависимости от температуры. Типовые значения 100 градусов — 177 Ом, 25 градусов — 2796 Ом, 0 градусов — 9420 Ом, -20 градусов — 28680 Ом. Температура охлаждающей жидкости влияет почти на все характеристики управления двигателем. Датчик температуры охлаждающей жидкости весьма надежен.
Основные неисправности — нарушение электрического контакта внутри датчика, нарушение изоляции или обрыв проводов.
Отказ датчика температуры охлаждающей жидкости — включение вентилятора на холодном двигателе, трудность запуска горячего мотора, повышенный расход топлива.
Датчик кислорода
Датчик кислорода (лямбда-зонд) установлен на приемной трубе глушителя. Серьезный, но весьма надежный электрохимический прибор.
Задача датчика кислорода — определение наличия остатков кислорода в отработавших газах. Есть кислород — бедная топливная смесь, нет кислорода — богатая. Показания датчика кислорода используются для корректировки подачи топлива. Категорически запрещается использование этилированного бензина.
Выход из строя датчика кислорода приводит к увеличению расхода топлива и вредных выбросов.
Датчик положения коленчатого вала (ДПКВ)
Датчик положения коленчатого вала предназначен для формирования электрического сигнала при изменении углового положения специального зубчатого диска, установленного на коленвале двигателя.
Датчик положения коленвала установлен около шкива коленвала и считывает сигналы по рискам. Это основной датчик, по показаниям которого определяется цилиндр, время подачи топлива и искры.
Конструктивно датчик положения коленвала представляет собой кусок магнита с катушкой тонкого провода. Очень вынослив.
Датчик положения коленвала работает в паре с зубчатым шкивом коленчатого вала. Отказ датчика — остановка двигателя. В лучшем случае ограничение оборотов двигателя в районе 3500 — 5000 об/ми.
Датчик фаз (распредвала ДКВ)
Устанавливается только на 16-ти клапанном двигателе. Информация используется для организации впрыска топлива в конкретный цилиндр.
Отказ датчика переводит топливоподачу в попарно-параллельный режим, что приводит к резкому обогащению топливной смеси.
Датчик фаз устанавливается на двигателе в верхней части головки блока цилиндров за шкивом впускного распредвала.
На шкиве впускного распредвала расположен задающий диск с прорезью. Прохождение прорези через зону действия датчика фаз соответствует открытию впускного клапана первого цилиндра.
Регулятор холостого хода (РХХ) (распредвала ДКВ)
РХХ является устройством, которое необходимо в системе для стабилизации оборотов холостого хода двигателя. РХХ представляет собой шаговый электродвигатель с подпружиненной конусной иглой.
Во время работы двигателя на холостом ходу, за счет изменения проходного сечения дополнительного канала подачи воздуха в обход закрытой заслонки дросселя, в двигатель поступает, необходимое для его стабильной работы, количество воздуха.
Этот воздух учитывается датчиком массового расхода воздуха (ДМРВ) и, в соответствии с его количеством, контроллер осуществляет подачу топлива в двигатель через топливные форсунки.
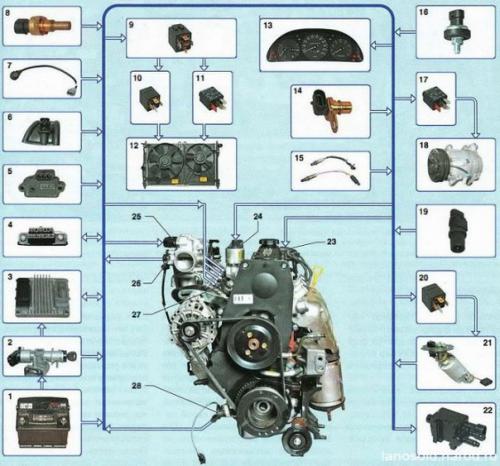
По датчику положения коленчатого вала (ДПКВ) контроллер отслеживает количество оборотов двигателя и в соответствии с режимом работы двигателя управляет РХХ, таким образом, добавляя или снижая подачу воздуха в обход закрытой дроссельной заслонки (см. Фото-2 и Фото-3).
На прогретом до рабочей температуры двигателе контроллер поддерживает обороты холостого хода. Если же двигатель не прогрет, контроллер за счет РХХ увеличивает обороты и, таким образом, обеспечивает прогрев двигателя на повышенных оборотах коленвала. Данный режим работы двигателя позволяет начинать движение автомобиля сразу и не прогревая двигатель.
Регулятор холостого хода установлен на корпусе дроссельной заслонки и крепится к нему двумя винтами. К сожалению, на некоторых автомобилях головки этих крепежных винтов могут быть рассверлены или винты посажены на лак, что может значительно усложнить демонтаж РХХ для его замены или прочистки воздушного канала. В таких случаях редко удается обойтись без демонтажа всего корпуса дроссельной заслонки.
РХХ является исполнительным устройством и его самодиагностика в системе не предусмотрена. Поэтому при неисправностях регулятора холостого хода лампа «CHECK ENGINE» не загорается. Симптомы неисправностей РХХ во многом схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки), но во втором случае чаще всего на неисправность ДПДЗ явно указывает лампа «CHECK ENGINE».
К неисправностям регулятора холостого хода можно отнести следующие симптомы:
- неустойчивые обороты двигателя на холостом ходу,
- самопроизвольное повышение или снижение оборотов двигателя,
- остановка работы двигателя при выключении передачи,
- отсутствие повышенных оборотов при запуске холодного двигателя,
- снижение оборотов холостого хода двигателя при включении нагрузки (фары, печка и т.д.).
Для демонтажа регулятора холостого хода необходимо при выключенном зажигании отключить его четырехконтактный разъем и отвернуть два крепежных винта. Монтаж РХХ производят в обратной последовательности. Кроме того, уплотнительное кольцо на фланце следует смазать моторным маслом.
Датчики автомобиля и их функции. Датчики на наших авто, назначение и принцип работы.
Датчики автомобиля и их функции. Датчики на наших авто, назначение и принцип работы.
Датчик массового расхода воздуха (ДМРВ.
Назначение датчика. Принцип действия.
Датчик массового расхода воздуха предназначен для преобразования расхода воздуха, поступающего в двигатель, в напряжение постоянного тока.
Информация датчика позволяет определить режим работы двигателя и рассчитать цикловое наполнение цилиндров воздухом на установившихся режимах работы двигателя, длительность которых превышает 0, 1 секунды.
 Чувствительный элемент датчика построен на принципе терморезистивного анемометра и выполнен в виде платиновой нагреваемой нити. Нить нагревается электрическим током, а с помощью термодатчика и схемы управления датчика ее температура измеряется и поддерживается постоянной.
Чувствительный элемент датчика построен на принципе терморезистивного анемометра и выполнен в виде платиновой нагреваемой нити. Нить нагревается электрическим током, а с помощью термодатчика и схемы управления датчика ее температура измеряется и поддерживается постоянной.Только в том случае, если через датчик поток воздуха увеличивается, то платиновая нить начинает охлаждаться, схема управления датчика увеличивает ток нагрева нити, пока температура ее не восстанавливается до первоначального уровня, таким образом величина тока нагрева нити пропорциональна расходу воздуха.
Вторичный преобразователь датчика преобразует ток нагрева нити в выходное напряжение постоянного тока.
С течением времени нить загрязняется, что приводит к смещению градуировочной характеристики датчика.
Для очистки нити от грязи после выключения двигателя (при выполнении определенных условий) нить прожигается до 900-1000°C импульсом тока в течение 1 секунды. Формирует импульс управления прожигом блок управления.
 Для промывки никак нельзя использовать кетоны и эфиры. По трём причинам:
Для промывки никак нельзя использовать кетоны и эфиры. По трём причинам:
1. растворяют компаунд.
2. при высыхании очень сильно охлаждают кристалл. Он может «Лопнуть\Треснуть».
3. растворяют «Маску» на кристалле (это отн. Не страшно, но в центре кристалла есть полимерная плёнка в окошке, похоже из полиэтилентерефталата, на которой тоже маска и металл. Напыление) если маска смоется, плёнка деформируется и оторвётся.
 Не надо:
Не надо:
— Лазить туда спичками\зубочистками и т. д.;.
— Промывать всякими разъедателями типа виннса и карбоклина.
 В общем, что остаётся?
В общем, что остаётся?
WD — 40. Там соляра и тяжёлые жирные кислоты. Моют хорошо, но надолго оставляют плёнку. Её надо смывать. Смывать нужно спиртами (этил / метил / изопропил) в смеси с дистиллированной водой (20% воды), или этил / бутил / пропил — ацетатами (Ч. Д. а. . они с водой нормально смешиваются (но хозтоварные грязные, и оставляют налёт. Думаю, что лучше кристалл поливать из шприца с тонкой иголкой. А сушить «Родным» вентилятором, включив его с компа. Ну, по крайней мере, искусственной смертью он не умрёт, а от естественной никто не застрахован. Хорошие результаты по промывке ДМРВ дает обычная промывка изопропиловым спиртом с предварительно разогретым, с помощью технического фена, до 60-70 градусов ДМРВ и промывочной жидкости.
 Датчик положения дроссельной заслонки (ДПДЗ).
Датчик положения дроссельной заслонки (ДПДЗ).
 Датчик положения дроссельной заслонки установлен сбоку на дроссельном блоке на одной оси с приводом дроссельной заслонки. Датчик положения дроссельной заслонки считывает показания с положения педали «Газа». Основной враг датчика положения дроссельной заслонки — мойщики двигателей.
Датчик положения дроссельной заслонки установлен сбоку на дроссельном блоке на одной оси с приводом дроссельной заслонки. Датчик положения дроссельной заслонки считывает показания с положения педали «Газа». Основной враг датчика положения дроссельной заслонки — мойщики двигателей.
Срок службы датчика положения дроссельной заслонки совершенно непредсказуем. Нарушения в работе датчика положения дроссельной заслонки проявляются в повышенных оборотах на холостом ходу, в рывках и провалах при малых нагрузках.
 Датчик детонации.
Датчик детонации.
 Датчик детонации установлен на блоке двигателя между 2-м и 3-им цилиндрами. Существуют два типа датчика детонации — резонансный (бочонок) и широкополосный (таблетка. Датчик детонации разных типов не взаимозаменяемы.
Датчик детонации установлен на блоке двигателя между 2-м и 3-им цилиндрами. Существуют два типа датчика детонации — резонансный (бочонок) и широкополосный (таблетка. Датчик детонации разных типов не взаимозаменяемы.
Датчик детонации — это надежный элемент, но требует регулярной чистки разъема. Принцип работы датчика детонации — как у пьезо — зажигалки. Чем сильнее удар, тем больше напряжение.
Отслеживает детонационные стуки двигателя. В соответствии с сигналом датчика детонации контроллер устанавливает угол опережения зажигания. Есть детонация — более позднее зажигание. Отказ или обрыв датчика детонации проявляются в «Тупости» мотора и повышенному расходу топлива.
Он представляет собой пустотелый шестигранный корпус с резьбовым выступом для вкручивания в ДВС. Внутри корпуса обычным винтиком прикручивается двухслойный пьезоэлемент, который и вырабатывает эдс при воздействии на него колебаний звуковой частоты через корпус датчика.
Эти колебания с помощью пьезоэлемента в аудиосигнал преобразуются. Таким образом, с помощью ДД блок EFI «Слышит», что происходит в двигателе во время его работы. То есть, это своеобразный микрофон, а точнее, пьезокерамический звукосниматель (как на проигрывателях виниловых пластинок.
Корпус по край залит специальным компаундом, по ощущению напоминающий хрупкую крошащуюся искусственную резину. Этот компаунд (на форуме его называют «Смолой») не только защищает пьезоэлемент от воздействия окружающей среды, но еще и создаёт специфическую АЧХ (амплитудно — частотную характеристику) сигнала, так как спектр ДД должен лежать в области 1400-6000 гц с центральной частотой в районе 2700 гц (примерная частота детонации.
В том случае, если появляются детонационные процессы, то блок EFI автоматически изменяет угол опережения зажигания (уоз) до тех пор, пока детонационные процессы не сведутся к минимуму или вообще не ликвидируются.
Таким образом, ДД является неотъемлемой частью цепей коррекции формирования и наиболее эффективного сжигания топливной смеси. Выход из строя ДД сопровождается появлением ошибки самодиагностики, детационными процессами в ДВС (при этом характерным так называемым «Звоном Пальцев»), худшей тягой, повышенным расходом топлива.
Датчик давления масла.
Давление масла в системе контролируется специальным датчиком, установленным в масляной магистрали. Электрический сигнал от датчика поступает к контрольной лампе на приборной панели. На автомобилях также может устанавливаться указатель давления масла.
Датчик давления масла может быть включен в систему управления двигателем, которая при опасном снижении давления масла отключает двигатель.
На современных двигателях устанавливается датчик контроля уровня масла и соответствующая ему сигнальная лампа на панели приборов. Наряду с этим, может устанавливаться датчик температуры масла.
Датчик температуры охлаждающей жидкости (дож).
Датчик температуры охлаждающей жидкости установлен между головкой блока и термостатом. Датчик температуры охлаждающей жидкости имеет два контакта. Основное функциональное назначение датчика температуры охлаждающей жидкости — чем холоднее мотор, тем богаче топливная смесь.
Конструктивно датчик температуры охлаждающей жидкости представляет собой термистор (резистор), сопротивление которого изменяется в зависимости от температуры. Типовые значения 100 гр. — 177 ом, 25 гр. — 2796 ом, 0 гр. — 9420 ом, — 20 гр. — 28680 ом. Температура охлаждающей жидкости почти на все характеристики управления двигателем влияет. Датчик температуры охлаждающей жидкости весьма надежен.
Основные неисправности — нарушение электрического контакта внутри датчика, нарушение изоляции или обрыв проводов.
Отказ датчика температуры охлаждающей жидкости — включение вентилятора на холодном двигателе, трудность запуска горячего мотора, повышенный расход топлива.
Датчик кислорода.
Датчик кислорода (лямбда зонд) установлен на приемной трубе глушителя. Серьезный, но весьма надежный электрохимический прибор.
Задача датчика кислорода — определение наличия остатков кислорода в отработавших газах.
Есть кислород — бедная топливная смесь, нет кислорода — богатая.
Показания датчика кислорода используются для корректировки подачи топлива.
Категорически запрещается использование этилированного бензина.
Выход из строя датчика кислорода приводит к увеличению расхода топлива и вредных выбросов.
Датчик положения коленчатого вала (ДПКВ).
Датчик положения коленвала предназначен для формирования электрического сигнала при изменении углового положения специального зубчатого диска, установленного на коленвале двигателя.
Датчик положения коленвала установлен около шкива коленвала и считывает сигналы по рискам. Это основной датчик, по показаниям которого определяется цилиндр, время подачи топлива и искры.
Конструктивно датчик положения коленвала представляет собой кусок магнита с катушкой тонкого провода. Очень вынослив.
Датчик положения коленвала работает в паре с зубчатым шкивом коленчатого вала. Отказ датчика — остановка двигателя. В лучшем случае ограничение оборотов двигателя в районе 3500 — 5000 об/ми.
Датчик фаз (распредвала ДКВ).
Устанавливается только на 16-тиклапанном двигателе. Информация для организации впрыска топлива в конкретный цилиндр используется.
Отказ датчика переводит топливоподачу в попарно — параллельный режим, что приводит к резкому обогащению топливной смеси.
Датчик фаз устанавливается на двигателе в верхней части головки блока цилиндров за шкивом впускного распредвала.
На шкиве впускного распредвала расположен задающий диск с прорезью. Прохождение прорези через зону действия датчика фаз соответствует открытию впускного клапана первого цилиндра.
Регулятор холостого хода (РХХ), распредвала ДКВ.
Является устройством, которое необходимо в системе для стабилизации оборотов холостого хода двигателя. РХХ Представляет из себя шаговый электродвигатель с подпружиненной конусной иглой.
Во время работы двигателя на холостом ходу, за счет изменения проходного сечения дополнительного канала подачи воздуха в обход закрытой заслонки дросселя, в двигатель поступает, необходимое для его стабильной работы, количество воздуха.
Этот воздух учитывается датчиком массового расхода воздуха (ДМРВ) и, в соответствии с его количеством, контроллер осуществляет подачу топлива в двигатель через топливные форсунки.
По датчику положения коленчатого вала (ДПКВ) контроллер отслеживает количество оборотов двигателя и в соответствии с режимом работы двигателя управляет РХХ, таким образом добавляя или снижая подачу воздуха в обход закрытой дроссельной заслонки (см. Фото — 2 и фото — 3.
На прогретом до рабочей температуры двигателе контроллер поддерживает обороты холостого хода. В том случае, если же двигатель не прогрет, контроллер за счет РХХ увеличивает обороты и, таким образом, обеспечивает прогрев двигателя на повышенных оборотах коленвала. Данный режим работы двигателя позволяет начинать движение автомобиля сразу и не прогревая двигатель.
Регулятор холостого хода установлен на корпусе дроссельной заслонки и крепится к нему двумя винтами.
К сожалению, на некоторых автомобилях головки этих крепежных винтов могут быть рассверлены или винты посажены на лак, что может значительно усложнить демонтаж РХХ для его замены или прочистки воздушного канала. В таких случаях редко удается обойтись без демонтажа всего корпуса дроссельной заслонки.
РХХ Является исполнительным устройством и его самодиагностика в системе не предусмотрена. Поэтому при неисправностях регулятора холостого хода лампа «Check Engine» не загорается. Симптомы неисправностей РХХ во многом схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки), но во втором случае чаще всего на неисправность ДПДЗ явно указывает лампа «Check Engine».
К неисправностям регулятора холостого хода можно отнести следующие симптомы:
— Неустойчивые обороты двигателя на холостом ходу, — самопроизвольное повышение или снижение оборотов двигателя, — остановка работы двигателя при выключении передачи, — отсутствие повышенных оборотов при запуске холодного двигателя, — снижение оборотов холостого хода двигателя при включении нагрузки (фары, печка и т. д. . для демонтажа регулятора холостого хода необходимо при выключенном зажигании отключить его четырехконтактный разъем и отвернуть два крепежных винта. Монтаж РХХ производят в обратной последовательности. Кроме того, уплотнительное кольцо на фланце следует смазать моторным маслом. Автор неизвестен.
Датчики эсуд. Что такое датчик, зачем он нужен, какую функцию выполняет?
Основным элементом системы управления двигателем является электронный блок управления (ЭБУ). Он способен воспринимать информацию только в виде электрических сигналов, характеризующихся тем или иным значением напряжения, частоты, скважности и т.п. Но параметры работы двигателя носят чисто физические характеристики. Чтобы сообщить их блоку управления, необходимо преобразовать физическую величину в величину электрическую, пригодную для обработки в блоке управления в соответствии с заложенной в него программой. Итак,
Датчик – это элемент системы управления двигателем, задача которого состоит в преобразовании физических величин, характеризующих работу двигателя, в электрические величины, пригодные для обработки электронным блоком управления.
Перечислим физические величины и явления, информация о которых необходима блоку управления:
- температура;
- давление;
- частота вращения;
- концентрация;
- количество воздуха;
- пространственное положение;
- вибрация.
Перечисленную совокупность датчики преобразуют в электрические параметры:
- напряжение;
- ток;
- частота.
Датчики мертвых Зон автомобиля.Система контроля слепых зон

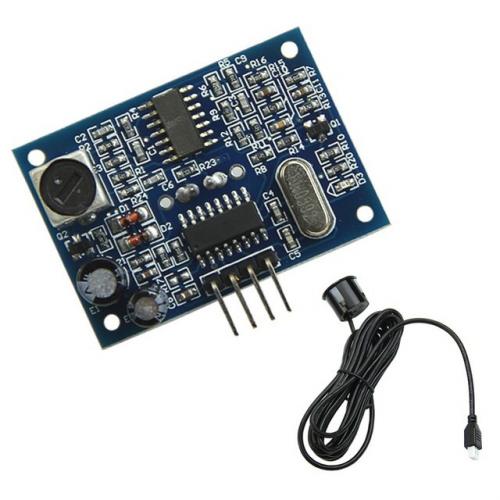
Почитал про такие штатные системы на Вольво, Ауди, Мерседес и др. Работают они либо от камер (вольво), либо от ультразвуковых сонаров. У Ардуино сонар есть, очень дешевый и бъет до 4 м. Но влагозащиты он не имеет. Полистав алибабу, нашел необходимое устройство. В его состав входит плата и датчик обычного парктроника (5в 40кГц).
Взял плату Arduino Uno
Gps модуль (про него чуть позже)

Преобразователь напряжения

Кусок RGB ленты

Вырезал диод из ленты, подпаял провода к цветам красный и зеленый.
Снял зеркала с авто, принялся выковыревать зеркальные элементы…сломал оба))) благо есть Авито)))
Купил новые. С обратной стороны между полосками подогрева зашкурил небольшой участок
Протянул проводку во внутрь зеркала
Вывел в через дверь к разъему в стойке
Благо есть свободные пины. Жаль, не оказалось под рукой таких мам и пап
Далее по салону прокинул и в багажник к заднему крылу.
Подобрал резисторы для этих диодов таким образом, чтобы при включении зеленого и красного получился нормальный желтый цвет.
На изгибе заднего бампера установил датчик, проводку завел через резиновую заглушку в задней панели кузова.
Теперь долгая и кропотливая работа с наладкой системы. Тут пипец, датчики то видят препятствие, то нет. Оказалось, плата преобразователя напряжения находилась вблизи от Ардуино, давала помехи. Убрал подальше, но система всё равно не идеально отрабатывает.
Поигрался с настройкой чувствительности сонаров, вроде удалось.
Теперь, для чего Gps модуль. Его я добавил для того, чтобы система начинала работать при скорости свыше заданной. Считываем скорость авто со спутников и отправляем в Ардуино. Иначе, когда машина стоит или движется задним ходом, сонары срабатывали от парктроника или просто от идущего человека…
В случае потери спутников (в тоннеле), система будет активна на любой скорости.
Все работает, но не идеально. Видимо, не хватает чувствительности датчикам. За такие копейки то)))
Если кому надо, могу выложить схему и скетч!
Датчики автомобиля и их функции. Устройство датчиков современного автомобиля
 До 70-го года прошлого века любой автомобиль был оборудован максимум тремя датчиками: уровня топлива, температуры охлаждающей жидкости и давления масла. Они подключались к магнитоэлектрическим и световым устройствам индикации на панели приборов. Их назначением являлось только информирование водителя о параметрах работы двигателя и количестве горючего. Тогда устройство датчиков автомобиля было очень простым.
До 70-го года прошлого века любой автомобиль был оборудован максимум тремя датчиками: уровня топлива, температуры охлаждающей жидкости и давления масла. Они подключались к магнитоэлектрическим и световым устройствам индикации на панели приборов. Их назначением являлось только информирование водителя о параметрах работы двигателя и количестве горючего. Тогда устройство датчиков автомобиля было очень простым.
Но время шло, и в 70-е годы того же столетия производители автомобилей стали уменьшать содержание вредных веществ в выхлопных газах, сходящих с их конвейеров авто. Необходимые для этого автомобильные датчики уже ничего не сообщали водителю, а только передавали информацию о работе двигателя в ЭБУ . Общее их количество в каждой машине значительно увеличилось. Следующее десятилетие ознаменовалось борьбой за безопасность при использовании машин, для этого были сконструированы новые датчики. Они предназначались для работы антиблокировочной системы тормозов и срабатывания пневматических подушек безопасности во время дорожно-транспортных происшествий.
АБС
Эта система предназначена для того чтобы не допускать полного блокирования колес при торможении. Поэтому устройство обязательно содержит датчики скорости вращения колес. Их конструкции различны. Они бывают пассивные или активные.
- Пассивные — это в большей мере индуктивные датчики. Собственно датчик состоит из стального сердечника и катушки с большим числом витков тонкого эмалированного медного провода. Для того чтобы он мог выполнять свои функции, на привод колеса или на ступицу напрессовывают стальное зубчатое кольцо. А датчик закрепляют так, чтобы при вращении колеса зубцы проходили вблизи сердечника и индуцировали в катушке электрические импульсы. Их частота следования и будет пропорциональным выражением скорости вращения колеса. Преимущества устройство такого типа: простота, отсутствие питания и низкая стоимость. Их недостатком является слишком маленькая амплитуда импульсов на скоростях до 7 км/час.
- Активные, которые бывают двух видов. Одни на основе всем известного эффекте Холла. Другие – магниторезистивные на основе одноименного явления. Магниторезистивный эффект состоит в изменении электрического сопротивления полупроводника при попадании в магнитное поле. Оба вида активных датчиков отличаются достаточной амплитудой импульсов при любых скоростях. Но их устройство сложнее, а стоимость выше пассивных. Да и то, что им необходимо питание, не назовешь преимуществом.
Датчики давления воздуха в шинах автомобиля. Конструкция
Работает такое оборудование за счет датчика, который устанавливается на диск, внутрь покрышки. Система включает в себя несколько компонентов:
- блок управления;
- ЖК-дисплей;
- приемную антенну;
- датчик давления в шинах.

Принцип работы («Тусон Хендай» не исключение) состоит в восприятии блоком сигналов, исходящих от каждого датчика. Последний элемент представляет собой сложное устройство, которое включает:
- датчик температуры;
- датчик давления воздуха;
- электронные механизмы управления и измерения;
- аккумулятор;
- антенну, которая передает полученный сигнал дальше на блок управления.
Проверка датчиков авто. Как проверить аккумулятор автомобиля мультиметром
Проверка аккумулятора автомобиля мультиметром включает в себя подключение сразу двух щупов. Мотор перед измерением также заглушите.
Красный щуп прислоните к «плюсовой» клемме, черный — к «минусовой». Если перепутаете — не страшно, прибор покажет актуальные цифры, просто со знаком минус.
Смотрите на экран прибора. Нормальный заряд аккумулятора колеблется в районе от 12,6 до 12,9 вольт.

Работу АКБ можно проверить также с запущенным мотором. При такой проверке аккумулятора автомобиля мультиметром вы также узнаете, как аккумулятор работает в паре с генератором, а также исправен ли регулятор напряжения.
Нормальные цифры при работающем двигателе — 13-14 вольт. Если мультиметр показывает меньше — аккумулятор нужно зарядить, или есть утечка тока.
Помните: мультиметр покажет заряд АКБ, но не расскажет о его работе исчерпывающе. Для этого существуют другие устройства. Например, нагрузочная вилка.
Как проверить датчики автомобиля мультиметром
Причиной «смерти» аккумулятора, скачков напряжения, ненужных значений на панели приборов могут быть различные датчики в машине. По опыту автомобилистов, чаще всего вызывают проблемы 5 видов датчиков:
- коленвала;
- скорости;
- детонации;
- ABS;
- кислородный датчик.
Понять, где они располагаются, вы можете из инструкции к машине, на сайтах автолюбителей, различных форумах.
Для проверки датчиков автомобиля мультиметром вам понадобится также информация о показателях напряжения в норме именно для вашего авто. Ее также можно найти в инструкции или в интернете.
Датчики нагрузки на ось грузового автомобиля. Датчик перемещения ДП-01.

Датчик перемещения GNOM DP-01 (ДП-01) устанавливают между кузовом (грузовой платформой) автомобиля и наиболее нагруженной подрессоренной осью. Он контролирует величину нагрузки на заднюю ось при помощи специального поворотного рычага, связанного с подвеской. При загрузке автомобиля положение рычага изменяется, что приводит к изменению выходного напряжения. Напряжение выходного сигнала не зависит от напряжения в бортовой сети, так как устройство оснащено встроенным стабилизатором питания. Имеется и защита от короткого замыкания.
Технические параметры:
- Сигнал: аналоговый с линейной характеристикой.
- Метод измерения: магниторезистивный.
- Угол поворота рычага, градус: ± 40.
- Изменение выходного напряжения, В: 1,54-3,46.
- Ошибка измерения, %: не более ±
- Напряжение питания, В: 8-32.
- Рабочий диапазон температур, градус Цельсия: -40+80.
- Вес, г: не более 800.
- Срок службы, моточас: не менее 18000.
Датчик дождя в автомобиле. Датчик дождя

Датчик дождя на лобовом стекле автомобиля
Датчик дождя — оптико-электронное устройство , устанавливаемое на ветровое стекло автомобиля и реагирующее на его увлажнение. Используется для автоматического управления стеклоочистителями и механизмами, закрывающими люк и стекла дверей.
Снег , дождь и грязь — серьёзная помеха комфортному и безопасному управлению автомобилем , а необходимость включения-выключения щёток и регулирования интенсивности их работы отвлекает водителя от дороги. Уже не первый год специалисты трудятся над созданием системы, позволяющей автоматизировать этот процесс. Однако до недавнего времени подобными устройствами оснащали лишь очень дорогие модели машин.
Сегодня автопроизводители постепенно начинают использовать датчики дождя в стандартной комплектации автомобилей среднего и гольф-класса , а разработчики таких систем управления предлагают автолюбителям несколько их типов, в том числе и предназначенные для самостоятельной установки.
Датчик дождя включает в себя инфракрасный излучатель и фотоприёмник небольших размеров. В память их электронных блоков заложены параметры преломления инфракрасных лучей на наружной поверхности сухих (чистых) и влажных (загрязнённых) стёкол. Капли дождя или грязь, попадающие на лобовое стекло, вызывают изменение пути преломления лучей. На это и реагирует система, которая активизирует стеклоочиститель, определяет режим работы дворников в зависимости от интенсивности осадков и время действия щёток, отключая их в нужный момент. Чувствительность светоприёмников очень высока. Они учитывают тысячные доли миллилитра воды на лобовом стекле и срабатывают в течение нескольких миллисекунд.
Перечисленные возможности уже в достаточной степени позволяют автоматизировать работу стеклоочистителя, но конструкторы не стали останавливаться на достигнутом. Они создали модели датчиков дождя, которые способны также включать омыватель при сильном загрязнении стекла. Полезный прибор устанавливают под лобовым стеклом, учитывая два правила : чтобы он не мешал обзору и находился в зоне действия щёток.
В комплект датчика дождя входят блок управления и блок реле . Первый представляет собой оптическое электронное устройство , которое даёт команду исполнительному механизму на включение стеклоочистителя и омывателя. Его помещают в хорошо проветриваемом месте так, чтобы он не стал помехой обзору водителя (как правило рядом с салонным зеркалом заднего вида в зоне, которая очищается при работе щёток лобового стекла). При этом ветровое стекло не должно иметь дефектов, влияющих на функционирование оптической системы блока, а щётки должны хорошо очищать стекло, иначе они будут работать дольше, чем необходимо.
Блок реле (исполнительное устройство) осуществляет непосредственное управление стеклоочистителем и омывателем. Кроме того, он защищает систему от динамических изменений напряжения в электрической цепи автомобиля и от воздействия кондуктивных помех. Его крепят в удобном для подключения к питанию месте, предусмотренном конструкцией автомобиля.
В своё время датчик дождя послужил темой для рекламного ролика Peugeot 307 .
Датчики на наших авто, назначение и принцип работы

ДАТЧИК МАССОВОГО РАСХОДА ВОЗДУХА (ДМРВ).
Назначение датчика. Принцип действия.
Датчик массового расхода воздуха предназначен для преобразования расхода воздуха, поступающего в двигатель, в напряжение постоянного тока.
Информация датчика позволяет определить режим работы двигателя и рассчитать цикловое наполнение цилиндров воздухом на установившихся режимах работы двигателя, длительность которых превышает 0,1 секунды.
Чувствительный элемент датчика построен на принципе терморезистивного анемометра и выполнен в виде платиновой нагреваемой нити. Нить нагревается электрическим током, а с помощью термодатчика и схемы управления датчика ее температура измеряется и поддерживается постоянной.
Если через датчик поток воздуха увеличивается, то платиновая нить начинает охлаждаться, схема управления датчика увеличивает ток нагрева нити, пока температура ее не восстанавливается до первоначального уровня, таким образом величина тока нагрева нити пропорциональна расходу воздуха.
Вторичный преобразователь датчика преобразует ток нагрева нити в выходное напряжение постоянного тока.
С течением времени нить загрязняется, что приводит к смещению градуировочной характеристики датчика.
Для очистки нити от грязи после выключения двигателя (при выполнении определенных условий) нить прожигается до 900—1000°C импульсом тока в течении 1 секунды. Формирует импульс управления прожигом блок управления.
Для промывки никак нельзя использовать кетоны и эфиры. По трём причинам:
1. Растворяют компаунд.
2. При высыхании очень сильно охлаждают кристалл. Он может \”лопнуть\\треснуть\”.
3. Растворяют \”маску\” на кристалле(это отн. не страшно, но в центре кристалла есть полимерная плёнка в окошке, похоже из полиэтилентерефталата,на которой тоже маска и металл. напыление) Плёнке пофиг, но если маска смоется, плёнка деформируется и оторвётся.
Не надо:
– лазить туда спичками\\зубочисками и прочими тампаксами
– промывать всякими разъедателями типа Виннса и Карбоклина.
– Большинство растворителей остаКарбовые очистители \”Абро\” и \”Hi-Gear\”.
– ВЭЛВовские аэрозоли содержат ацетон (про кетоны я уже сказал) и этиловый эфир, их не использовать.
В общем, что остаётся?
WD-40. Там соляра и тяжёлые жирные кислоты. Моют хорошо, но надолго оставляют плёнку. Её надо смывать. Смывать нужно спиртами (этил / метил / изопропил) в смеси с дистиллированной водой(20% воды), или этил / бутил / пропил – ацетатами(Ч.Д.А.). Они с водой нормально смешиваются (но хозтоварные грязные, и оставляют налёт). Думаю, что лучше кристалл поливать из шприца с тонкой иголкой. А сушить \”родным\” вентилятором, включив его с компа. Ну, по крайней мере, искусственной смертью он не умрёт, а от естественной никто не застрахован.:о) Хорошие результаты по промывке ДМРВ дает обычная промывка изопропиловым спиртом с предварительно разогретым, с помощью технического фена, до 60-70 градусов ДМРВ и промывочной жидкости.
ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ (ДПДЗ)
Датчик положения дроссельной заслонки установлен сбоку на дроссельном блоке на одной оси с приводом дроссельной заслонки. Датчик положения дроссельной заслонки считывает показания с положения педали \”газа\”. Основной враг датчика положения дроссельной заслонки – мойщики двигателей.
Срок службы датчика положения дроссельной заслонки совершенно непредсказуем. Нарушения в работе датчика положения дроссельной заслонки проявляются в повышенных оборотах на холостом ходу, в рывках и провалах при малых нагрузках.
ДАТЧИК ДЕТОНАЦИИ
Датчик детонации установлен на блоке двигателя между 2-м и 3-им цилиндрами. Существуют два типа датчика детонации – резонансный ( бочонок ) и широкополосный ( таблетка ). Датчик детонации разных типов не взаимозаменяемы.
Датчик детонации – это надежный элемент, но требует регулярной чистки разъема. Принцип работы датчика детонации как у пьезо зажигалки. Чем сильнее удар, тем больше напряжение.
Отслеживает детонационные стуки двигателя. В соответствии с сигналом датчика детонации контроллер устанавливает угол опережения зажигания. Есть детонация – более позднее зажигание. Отказ или обрыв датчика детонации проявляются в \”тупости\” мотора и повышенному расходу топлива.
Он представляет собой пустотелый шестигранный корпус с резьбовым выступом для вкручивания в ДВС. Внутри корпуса обычным винтиком прикручивается двухслойный пьезоэлемент, который и вырабатывает ЭДС при воздействии на него колебаний звуковой частоты через корпус датчика.
Эти колебания с помощью пьезоэлемента преобразуются в аудиосигнал. Таким образом, с помощью ДД блок EFI \”слышит\”, что происходит в двигателе во время его работы. То есть, это своеобразный микрофон, а точнее, пьезокерамический звукосниматель (как на проигрывателях виниловых пластинок).
Корпус по край залит специальным компаундом, по ощущению напоминающий хрупкую крошащуюся искусственную резину. Этот компаунд (на форуме его называют \”смолой\”) не только защищает пьезоэлемент от воздействия окружающей среды, но еще и создаёт специфическую АЧХ (амплитудно-частотную характеристику) сигнала, так как спектр ДД должен лежать в области 1400-6000Гц с центральной частотой в районе 2700Гц (примерная частота детонации).
Если появляются детонационные процессы, то блок EFI автоматически изменяет угол опережения зажигания (УОЗ) до тех пор, пока детонационные процессы не сведутся к минимуму или вообще не ликвидируются.
Таким образом, ДД является неотъемлемой частью цепей коррекции формирования и наиболее эффективного сжигания топливной смеси. Выход из строя ДД сопровождается появлением ошибки самодиагностики, детационными процессами в ДВС (при этом характерным так называемым \”звоном пальцев\”), худшей тягой, повышенным расходом топлива.
ДАТЧИК ДАВЛЕНИЯ МАСЛА
Давление масла в системе контролируется специальным датчиком, установленным в масляной магистрали. Электрический сигнал от датчика поступает к контрольной лампе на приборной панели. На автомобилях также может устанавливаться указатель давления масла.
Датчик давления масла может быть включен в систему управления двигателем, которая при опасном снижении давления масла отключает двигатель.
На современных двигателях устанавливается датчик контроля уровня масла и соответствующая ему сигнальная лампа на панели приборов. Наряду с этим, может устанавливаться датчик температуры масла.
ДАТЧИК ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ ЖИДКОСТИ (ДОЖ)
Датчик температуры охлаждающей жидкости установлен между головкой блока и термостатом. Датчик температуры охлаждающей жидкости имеет два контакта . Основное функциональное назначение датчика температуры охлаждающей жидкости – чем холоднее мотор, тем богаче топливная смесь.
Конструктивно датчик температуры охлаждающей жидкости представляет собой термистор ( резистор ), сопротивление которого изменяется в зависимости от температуры. Типовые значения 100 гр. – 177 Ом, 25 гр. – 2796 Ом, 0 гр. – 9420 Ом, – 20 гр. – 28680 Ом. Температура охлаждающей жидкости влияет почти на все характеристики управления двигателем. Датчик температуры охлаждающей жидкости весьма надежен.
Основные неисправности – нарушение электрического контакта внутри датчика, нарушение изоляции или обрыв проводов .
Отказ датчика температуры охлаждающей жидкости – включение вентилятора на холодном двигателе, трудность запуска горячего мотора, повышенный расход топлива.
ДАТЧИК КИСЛОРОДА
Датчик кислорода(лямбда зонд) установлен на приемной трубе глушителя. Серьезный, но весьма надежный электрохимический прибор.
Задача датчика кислорода- определение наличия остатков кислорода в отработавших газах.
Есть кислород – бедная топливная смесь, нет кислорода – богатая.
Показания датчика кислорода используются для корректировки подачи топлива.
Категорически запрещается использование этилированного бензина.
Выход из строя датчика кислорода приводит к увеличению расхода топлива и вредных выбросов.
ДАТЧИК ПОЛОЖЕНИЯ КОЛЕНЧАТОГО ВАЛА (ДПКВ)
Датчик положения коленвала предназначен для формирования электрического сигнала при изменении углового положения специального зубчатого диска, установленного на коленвале двигателя.
Датчик положения коленвала установлен около шкива коленвала и считывает сигналы по рискам. Это основной датчик, по показаниям которого определяется цилиндр, время подачи топлива и искры.
Конструктивно датчик положения коленвала представляет собой кусок магнита с катушкой тонкого провода. Очень вынослив.
Датчик положения коленвала работает в паре с зубчатым шкивом коленчатого вала. Отказ датчика – остановка двигателя. В лучшем случае ограничение оборотов двигателя в районе 3500 – 5000 об/ми.
ДАТЧИК ФАЗ (распредвала ДКВ)
Устанавливается только на 16 – ти клапанном двигателе. Информация используется для организации впрыска топлива в конкре
Датчики двигателя
Электронная система автомобиля состоит из блоков управления и многочисленных датчиков, объединенных в единую сеть разветвленной паутиной проводки. Взаимодействие между элементами этой цепи осуществляется посредством электрических сигналов с определенными параметрами. Работа всех деталей характеризуется механической энергией. Преобразование механической энергии движения в электронные импульсы, с последующей передачей на ЭБУ – это задача датчиков.
Содержание статьи
Как работают датчики двигателя и как их проверять
Преобразовываются в импульсы параметры таких физических явлений, как:
- Температура различных жидкостей, газов и агрегатов
- Давление в различных средах и системах
- Скорость, направление и количество валовых оборотов
- Концентрация веществ во всевозможных смесях (жидкости и газов)
- Количественные и объемные параметры воздушного потока
- Относительное пространственное положение подвижных деталей
- Вибрационные колебания и другие факторы


Допустим, нужно протестировать какой-то датчик. С ЭБУ он получает напряжение в 5В. Подключив диагностическое оборудование (автосканеры и мотортестеры) к проводам соединения датчика с блоком, можно видеть «картину» передаваемого сигнала. Сканеры позволяют оценить качество сигналов в общих чертах, к тому же, они не применимы к старым моделям автомобилей. Мотортестер же, дает точное понятие о мельчайших деталях, хотя требуется больше труда в его использовании.
Схема включения датчиков в электронную систему ЭБУ
Эффективное проведение диагностики двигателя, напрямую зависит от понимания особенностей включения его датчиков в электронную цепь системы.
Общий провод электрической цепи автомобиля («масса») объединяет кузов и мотор, и подключается к отрицательному электроду аккумулятора. Так вот, к этому проводу соединяется и блок, и датчик.
Если соединить датчик в произвольной точке этого провода (соответственно, другой конец соединить с ЭБУ), то в зону действия датчика попадает интервал общей сети, где одновременно с его слабым напряжением, проходят сигналы сильного напряжения (например, стеклоподъемников). Это создает большие помехи, приводя к искажению переданной информации.
Выход один – соединение прямо к выходу «массы» ЭБУ, который уже имеет соединение с «массой» кузова. Из всех датчиков провода входят в блок, там соединяются с «массой». Тем самым устраняются помехи на пути передачи сигнала.
Проводка датчиков, ответственных за наиболее точную информацию (к примеру, ДПДЗ), снабжена экраном, в виде фольговой оплетки, предназначенным дополнительно глушить возможные помехи.
Разновидности датчиков двигателя
Различие в основных принципах работы, дает нам право, классифицировать датчики следующим образом:
- Потенциометры или датчики положения
Конструкция состоит из резистивной дугообразной дорожки, с одной стороны соединенной с «массой», а другой получает питание. Если на этот выход подать напряжение 12В, то на противоположном выходе создается нулевое напряжение. Скользящий по дуге, ползунок снимает показания напряжения на всем участке. По мере прохождения от одного конца к другому, напряжение на нем меняется то 12В до 0. Эти изменения напряжения и есть сигналы, передаваемые в ЭБУ.
- Пьезоэлектрические
- Терморезистивные или температурные датчики. Это полупроводниковые резисторы, у которых изменение температуры, приводит к изменению напряжения в полупроводниках. Эти перепады фиксируются в ЭБУ, на основании чего регулируется работа систем.
- Термоанемометрические или датчики давления
Тестирование датчиков двигателя
Датчик положения дроссельной заслонки – яркий представитель потенциометрического типа устройства. Он вживлен в ось заслонки. Надавливая на педаль газа, водитель заставляет заслонки менять свое положение, полностью раскрываются. Изменения положения, ведут к изменению напряжения в ползунке датчика. Сведения об этом, немедленно передаются в ЭБУ, который начинает регуляцию топливной подачи форсункой.
Все изменения должны протекать плавно, без рывков и значительных скачков. Наиболее наглядно можно увидеть картину происходящего на осциллограмме. Подключается осциллограф, и анализируется график. Провалы, резкие скачки, «пилообразный» характер осциллограммы, свидетельствует о неисправности датчика. Простой вольтметр не в состоянии зафиксировать миллисекундные скачки напряжения. Мультиметром можно замерять предельные показания напряжения.
Проверку сканером осуществляют по стандартной схеме: подключают его к разъему, в «потоке данных» найти показания напряжения в этом датчике. Снимать все показания, медленно передвигая заслонки. По плавности нарастания ( без скачков и провалов) напряжения, можно судить об исправности датчика.
Исправность ДПДЗ проверяется, когда:
– получив оповещение об ошибке
– сбои двигателя – затрудненный запуск, нестабильные обороты
– повышенное расходование топлива, усиление детонации, перебойный характер работы мотора
– когда требуется настройка датчиков определенных фирм – производителей
Датчик ОЖ – резисторный прибор, где изменение температуры приводит к колебаниям его электрических характеристик (сопротивления и напряжения). Он устанавливается в просвете трубки ОС и погружен в ОЖ. С остыванием жидкости, увеличивается сопротивление прибора (100Ом при t= -44°С). ЭБУ подает стабилизационное напряжение, измеряет степень ее понижения – на прогретом двигателе его показатели низкие, холодный мотор выдает высокое напряжение. Так ЭБУ определяет текущую t ОЖ, необходимую во многих регуляционных процессах.
Обрыв или отход контакта, воспринимается ЭБУ в форме понижения температуры ОЖ. Это свидетельствует об увеличении доли горючего в смеси. Это действительно так – коррекция происходит в сторону увеличения содержания бензина в смеси.
Всякие механические повреждения или разомкнутая цепь, воспринимается ЭБУ в виде оповещения о повышение температуры ОЖ, что оборачивается уменьшением доли топлива в смеси, выдачей расшифровки « работа на обедненной смеси».
Признаки неисправности:
– индикатор не панели
– соответствующая ошибка и ее код
– повышение «аппетита» двигателя, токсичность выхлопов
– затрудненный запуск, самопроизвольная остановка
Перед началом диагностики, нужно «привести в норму» охлаждающую систему. Она должна быть заправлена, крышку следует открывать после остывания. Датчик утоплен в жидкости, соблюдена герметичность, чтобы избыток воздуха не создавал помехи . Сама ОЖ правильно разбавлена. Проверить работу вентилятора и термостата.
Самую удобную и точную проверку можно провести сканером Bosch KTS, имеющий большой выбор адаптеров и аппарат мультиплекора. Универсальный диагностический сканер способен тестировать 145 систем и 17000 блоков. Поддерживают протоколы ISO, SAE, OBD. Имеет функции:
– считка кодов и вывод расшифровки
– сброс памяти
– сброс интервалов ТО
– текущие параметры и их графики
– опознание блоков
– базовые опции
Кислородный датчик – лямбда зонд
Протокол OBD предписывает постоянное значение коэффициент λ=1, что соответствует стехиометрической концентрации топливной смеси. Это экономит горючее и снижает токсичность выбросов.
Датчик реагирует на давление кислорода в выхлопных газах. При определенных сбоях системы двигателя, когда кислород не в полном объеме расходуется при сгорании топлива, он поступает в выпускной коллектор. Тогда посылаются сигналы в ЭБУ, которые тот расшифровывает как обедненная смесь. Если в коллекторе нарушена герметичность, то к такому же результату приведет реакция датчика на, проникший туда, кислород.
Причиной искажения сигналов может стать и «отравление» датчика, вредными веществами (свинца и кремния) коллектора. Также, механические повреждения или плохое заземление.
Тестирование можно провести, все тем же, сканером Bosch KTS.
- Соединить прибор через разъем
- Прогреть датчик и двигатель, поднять обороты до 3 тыс
- Проверить замкнутость цепи
- Снять осциллограмму
- Проанализировать ее
Когда датчик исправен, график плавно колеблется в интервале 4 – 19 Гц. А напряжение 0.15 – 0.4В – нижний предел, 0.5 – 0.8В верхний предел.
Ко всему вышеизложенному, остается добавить – важность корректного функционирования датчиков двигателя, как и всех остальных, трудно переоценить. Без этого запускается цепной процесс разладов всех систем автомобиля.
Датчик коленвала
Датчик положения коленвала – один из важнейших частей в электронной системе управления двигателем. Датчик положения коленвала сообщает блоку управления когда необходимо произвести искру и подать топливо в нужный цилиндр. Во веря вращения коленвала и установленного на нем диска с зубьями, датчик реагирует на зубья, вращающиеся рядом с датчиком.Датчик коленчатого вала генерирует импульсы тока, которые считывает ЭБУ и решает в какой из поршней в каком цилиндре достиг верхней точки. Неисправный датчик коленвала перестает подавать сигналы блоку управления, это приводит к тому, что информации о положении поршней не поступает и двигатель глохнет.
Датчик устроен достаточно просто. Внутри он полностью заполнен компайндом, что делает его не пригодным к ремонту. Обычно датчик коленвала выходит из строя из-за реского скачка напряжения, происходит замыкание и нарушается сигнал импульсов, по которым ЭБУ считывает информацию. Со временем межвитковое замыкание нарастает и датчик выходит из строя.В первом случае двигатель будет работать с перебоями, а в дальнейшем попросту заглохнет. Бывают случаи, что двигатель работает до тех пор пока вы не заглушили машину, а после мотор уже не заведется.
Причин нестабильной работы датчика коленвала можем быть несколько:
1. Механическое повреждение датчика, что происходит крайне редко
2. Сломано одно из зубьев, по которым считывается информация
3. Не жесткая посадка шкива на коленвале, шкив расшатан, что на больших оборотах дает нестабильную работу двигателя
4. Проверьте свечи, если нет искры, а на катушке зажигания есть бортовое напряжение при включенном зажигании, датчик неисправен.
5. При врщении стартером коленвала, на форсунки подается напряжение +12В, если напряжения нет, датчик коленвала вышел из строя.
6. Датчик забит маслом и грязью – проведите визуальный осмотр.
7. Окислены клемы, необходимо их очистить и попытаться завести двигатель.
8. Обрыв провода – прозвоните проводку тестером.
Проверить датчик коленвала на работоспособность можно несколькими способами:
1. Проверить сопротивление, отсоеденив клему от датчика. У разных типов датчика оно отличается и должно быть в пределать 600-900ОМ. Сопротивление необходимо измерять при температуре 20-25 град.
2. Второй способ, открутить датчик и не снимая клемы подключить вольтметр к проводам, для этого проткните изоляцию тонкой иглой. Проведите металическим предметом возле датчика, если на вольтметре будет скачен напряжения, датчик исправен.
Устройство датчиков современного автомобиля — Auto-Self.ru
До 70-го года прошлого века любой автомобиль был оборудован максимум тремя датчиками: уровня топлива, температуры охлаждающей жидкости и давления масла. Они подключались к магнитоэлектрическим и световым устройствам индикации на панели приборов. Их назначением являлось только информирование водителя о параметрах работы двигателя и количестве горючего. Тогда устройство датчиков автомобиля было очень простым.
Но время шло, и в 70-е годы того же столетия производители автомобилей стали уменьшать содержание вредных веществ в выхлопных газах, сходящих с их конвейеров авто. Необходимые для этого автомобильные датчики уже ничего не сообщали водителю, а только передавали информацию о работе двигателя в ЭБУ. Общее их количество в каждой машине значительно увеличилось. Следующее десятилетие ознаменовалось борьбой за безопасность при использовании машин, для этого были сконструированы новые датчики. Они предназначались для работы антиблокировочной системы тормозов и срабатывания пневматических подушек безопасности во время дорожно-транспортных происшествий.
АБС
Эта система предназначена для того чтобы не допускать полного блокирования колес при торможении. Поэтому устройство обязательно содержит датчики скорости вращения колес. Их конструкции различны. Они бывают пассивные или активные.
- Пассивные — это в большей мере индуктивные датчики. Собственно датчик состоит из стального сердечника и катушки с большим числом витков тонкого эмалированного медного провода. Для того чтобы он мог выполнять свои функции, на привод колеса или на ступицу напрессовывают стальное зубчатое кольцо. А датчик закрепляют так, чтобы при вращении колеса зубцы проходили вблизи сердечника и индуцировали в катушке электрические импульсы. Их частота следования и будет пропорциональным выражением скорости вращения колеса. Преимущества устройство такого типа: простота, отсутствие питания и низкая стоимость. Их недостатком является слишком маленькая амплитуда импульсов на скоростях до 7 км/час.
- Активные, которые бывают двух видов. Одни на основе всем известного эффекте Холла. Другие – магниторезистивные на основе одноименного явления. Магниторезистивный эффект состоит в изменении электрического сопротивления полупроводника при попадании в магнитное поле. Оба вида активных датчиков отличаются достаточной амплитудой импульсов при любых скоростях. Но их устройство сложнее, а стоимость выше пассивных. Да и то, что им необходимо питание, не назовешь преимуществом.
Система смазки
Автомобильные датчики, контролирующие параметры работы этой системы, бывают трех видов:
- Датчик уровня масла. Имеет, пожалуй, самое простое устройство. Это поплавок, вертикально движущийся в поддоне картера по направляющей и замыкающий контакты при достижении поверхностью масла минимально допустимого уровня. Добавление масла приводит к подъему уровня и размыканию контактов.
- Датчик давления масла (ДД). Чаще всего он бывает электромеханический. Его устройство упругой диафрагмой делится на две части. Которая под действием давления масла деформируется и перемещает движок потенциометра. В результате чего изменяется сопротивление между клеммой выхода и массой. При падении давления масла диафрагма возвращается под действием пружины.
- Датчик недостаточного (аварийного) давления. Состоит из такой же, как у ДД диафрагмы с пружиной, и контакта, нормально замкнутого на массу. К его клемме подключается один из контактов контрольной лампочки аварийного давления масла в комбинации приборов. На другой контакт этой лампочки при включении зажигания подается питание, поэтому она начинает светиться. После пуска двигателя диафрагма под действием давления масла размыкает контакт клеммы датчика с массой. При этом контрольная лампа гаснет. Снижение давления масла менее допустимого приводит к тому, что под действием пружины клемма замыкается на массу и лампа вновь загорается, сигнализируя о недостатке давления в системе.

Охлаждение двигателя
Автомобиль с карбюраторным двигателем оснащался двумя датчиками температуры. Один из них включал электрический вентилятор радиатора для поддержания рабочей температуры. С другого снимало показания устройство индикации. Система охлаждения современного автомобиля, оснащенного электронным блоком управления двигателем (ЭБУ), также имеет два датчика температуры. Один из них использует устройство индикации температуры охлаждающей жидкости в комбинации приборов. Другой термодатчик необходим для работы ЭБУ. Их устройство принципиально не различается. Оба они являются термисторами, имеющими отрицательный температурный коэффициент. То есть их сопротивление при уменьшении температуры понижается.
Впускной тракт
- Датчик массового расхода воздуха (ДМРВ). Предназначен для определения объема воздуха, поступающего в цилиндры. Это необходимо, чтобы рассчитать количества топлива для образования сбалансированной топливовоздушной смеси. В состав узла входят деве нити из платины, через которые пропускают электрический ток. Одна из них находится в потоке воздуха, поступающего в мотор. Другая, эталонная – в стороне от него. Токи, проходящие через них, сравниваются в ЭБУ. По разнице между ними определяют объем, поступающего в мотор воздуха. Иногда для большей точности учитывают температуру воздуха.
- Датчик абсолютного давления воздуха во впускном коллекторе, называемый еще MAP-сенсором. Используется для определения объема воздуха, поступающего в цилиндры. Он может быть альтернативой ДМРВ для турбированных моторов. Устройство состоит из корпуса и керамической диафрагмы с напылением тензорезистивной пленки. Объем корпуса делится диафрагмой на 2 части. Одна из них герметична, а воздух из нее откачен. Другая соединяется трубкой с впускным коллектором, поэтому давление в ней равно давлению нагнетаемого в мотор воздуха. Под действием этого давления диафрагма деформируется, от этого меняется сопротивление пленки на ней. Это сопротивление и характеризует абсолютное давление воздуха в коллекторе.
- Датчик положения дроссельной заслонки (ДПДЗ). Выдает сигнал, пропорциональный углу открывания воздушной заслонки. Является, в сущности, переменным резистором. Его неподвижные контакты соединяются с массой и с опорным напряжением. А с подвижного, механически связанного с осью дроссельной заслонки, снимается выходное напряжение.
Выхлопная система
Кислородный датчик. Это устройство играет роль обратной связи для поддержания нужного соотношения воздуха и топлива в камерах сгорания. Его работа базируется на принципе действия гальванического элемента с твердым электролитом. В качестве последнего выступает керамика на основе диоксида циркония. Электродами конструкции служит напыление платины с обеих сторон керамики. Устройство начинает работать после разогрева до температуры от 300 до 400 ◦C.
Разогрев до такой высокой температуры происходит обычно горячими выхлопными газами либо нагревательным элементом. Такой температурный режим необходим для возникновения проводимости керамического электролита. Присутствие в выхлопе двигателя не сгоревшего топлива является причиной появления на электродах датчика разности потенциалов. Несмотря на то, что все привыкли называть этот прибор датчиком кислорода, он является скорее датчиком не сгоревшего топлива. Так как появление выходного сигнала происходит при контакте его поверхности не с кислородом, а с парами топлива.
Прочие датчики
- Датчик детонации. Предназначен, как можно догадаться, для обнаружения в двигателе процесса детонации. Для его работы используются пьезоэлектрические свойства кварца. Деформация пластины из этого материала вызывает возникновение на ее торцах разности потенциалов. ЭБУ в ответ на появление импульсов детонации уменьшает угол опережения зажигания.
- Датчик положения коленвала (ДПКВ). Формирует импульс, соответствующий ВМТ поршней I и IV цилиндров. Без сигнала этого датчика невозможно точно определить моменты впрыска топлива и искрообразования. Время их появления измеряется величиной задержки относительно импульса этого датчика. Скорость вращения коленвала оценивается по частоте следования этих импульсов. Устройство чаще всего бывает магниторезистивным или датчиком Холла.
- Датчик положения распредвала (ДПРВ). Служит для формирования импульсного сигнала такта сжатия в I цилиндре. Для уверенной работы при невысокой частоте вращения распредвала это устройство делают только на основе эффекта Холла. Остальные фазы газораспределения определяют с учетом этого импульса при помощи сигнала ДПКВ.


Поделитесь с друзьями в соц.сетях:
Google+
Telegram
Vkontakte
Датчики двигателя внутреннего сгорания. Как работают!
Совсем недавно наткнулся на очень интересное видео, в котором рассказывается о том, какие датчики устанавливаются на двигатели внутреннего сгорания, за что они отвечают и как они работают. Данная система не характеризует все варианты двигателей одновременно, но, по сути, показанная схема работы примерно такая во всех ДВС с возможными небольшими отклонениями в силу их модификации. Могу поспорить что это видео будет очень интересно тем, кто только начал знакомиться с устройством автомобиля и интересуется как работает двигатель современного атмосферного авто.
В этом ролике Вы узнаете информацию о следующих датчиках:
- Датчик массового расхода воздуха (ДМРВ) — этот датчик обычно устанавливается сразу же за воздушным фильтром в системе впуска, он измеряет количество воздуха, поступающего в двигатель. Иногда в данном датчике совмещен датчик температуры воздуха. Показания датчика отправляются в электронный блок управления двигателем (он де “мозги” и он же ЭБУ). Датчик необходим для правильного расчета топливовоздушной смеси.
- Датчик положения дроссельной заслонки (ДПДЗ) — располагается на самой дроссельной заслонке. Он сообщает ЭБУ о положении заслонки и динамики ее движения. Положение заслонки напрямую привязано к педали газа, чем сильнее жмем на газ, тем больше она открывается и пропускает больше количество воздуха.
- Датчик положения коленчатого вала (ДПКВ) — один из самых важных датчиков в двигателе, обычно располагается рядом со шкивом коленвала или около маховика. Он определяет положение и скорость вращения коленчатого вала. Для определения скорости вращения на шкиве предусмотрен зубчатый диск, а для определения его положения на диске есть метка, пропущенный зубчик. На основе показания с этого датчика устанавливается момент впрыска ТВС (топливовоздушной смеси) и угол опережения зажигания.
- Датчик положения распределительного вала (ДПРВ) располагается в районе головки блока цилиндров, рядом с распредвалом. Как не сложно понять, он определяет положение распределительного вала ДВС. В самом примитивном его исполнении он показывает положение верхней мертвой точки поршня первого цилиндра в такте сжатия. На его основе ЭБУ узнает, когда нужно производить впрыск топлива форсунками и зажигает ТВС.
- Датчик детонации (ДД) располагается на блоке цилиндров, обычно располагается в его верхней части между вторым и третьим цилиндром в “четырех горшковом” блоке. Этот датчик очень важен, он улавливает металлические стуки в двигателе, которые характерны детонации ТВС в камере внутреннего сгорания. По показаниям данного датчика ЭБУ может корректировать угол опережения зажигания ТВС, чтобы предотвратить детонацию в двигателе, если это возможно. Обычно при этом двигатель теряет часть мощности.
- Датчик температуры охлаждающей жидкости (ДТОЖ), находится недалеко от выхода жидкости из блока цилиндров (или термостате или тройниках системы охлаждения). Сам датчик измеряет температура антифриза, что вполне логично. По показаниям данного датчика ЭБУ корректирует работу двигателя при его запуске “на холодную”. Будут повышенные обороты двигателя, а также ЭБУ формирует более богатую топливно-воздушную смесь. В случае превышения нормы температуры охлаждающей жидкости, ЭБУ включает вентиляторы радиатора.
- Датчик кислорода (ДК), он же лямбда зонд, устанавливается в выпускной системе до катализатора. В авто под “Евро 2” устанавливался всего один датчик, в авто под “евро 4” и выше устанавливается два или три датчика. Эти датчики показывают количество кислорода в выхлопных газах двигателя. На основе первого регулирующего датчика ЭБУ корректирует подачу топлива форсунками, обогащает или обедняет ТВС, в зависимости от показаний лямбда-зонда. Второй (третий) датчик играет диагностическую роль и может давать оценку работы катализатора, а также влиять на формирование ТВС.
- Датчик скорости автомобиля (ДСА) обычно находиться на коробке передач автомобиля или он может быть совмещен с датчиком АБС, располагаясь на ступице в районе ШРУСА. Данные о скорости также влияют на формирование и подачу ТВС в камеры сгорания ДВС.
- Датчик давления масла (ДДМ) необходим для определения давления масла в системе смазки двигателя. Хочется сказать, что в некоторых современных автомобилях он просто отсутствует в силу победы маркетологов над инженерами. Показания данного датчика являются информативными и не влияют на работу ДВС. Нужно знать, что данный датчик не показывает уровень масла в системе, и обычно, когда загорается масленка на панели приборов водителя, то уже слишком поздно подливать масло, так как в ДВС в это время уже начался износ трущихся поверхностей.
- Датчик температуры всасываемого воздуха (ДТВВ). О нем я уже писал чуть выше, он может быть совмещен с датчиком 1 (ДМРВ) или же быть как обособленный датчик в системе впуска. Данные датчика позволяют определять плотность всасываемого воздуха для корректировки ТВС.
- Датчик абсолютного давления (ДАД) помогает ЭБУ рассчитать правильную пропорцию ТВС. Зная температуру воздуха и его давление можно рассчитывать ТВС без ДМРВ, но обычно данный датчик работает в паре с ним и с датчиком температуры воздуха.
- Датчик неровной дороги (ДНД) устанавливается далеко не на каждом автомобиле, он располагается на чашке стойки и амортизатора переднего колеса. Он улавливает колебания кузова при движении автомобиля по неровной поверхности. Данные показания отправляются в ЭБУ, которое в свою очередь отключает диагностику пропусков зажигания вследствие неравномерного вращения коленчатого вала, что может быть последствием движения по неровной дороге.
В случае выхода из строя почти всех перечисленных датчиков, электронный блок управления автомобиля перейдет в аварийный режим работы двигателя, а данные с вышедшего из строя датчика будут замещаться усредненными показателями заложенными в ЭБУ. Но в случае выхода из строя датчика положения коленчатого вала, двигатель может перестать работать. Обычно выход из строя датчиков сопровождается индикацией лампочкой “CHECK ENGINE” на панели приборов, но это не факт. Для каждого автомобиля индикация может показываться, а может и не показываться. Если, к примеру взять мою Шкоду Октавию, то отключение датчика ДМРВ никак не показывается на приборке, но если диагностическим сканером прочитать ошибки, то она будет записана в память.
Материалы данной статьи были взяты из самого видео.
Датчики систем безопасности при движении автомобиля
Развитие технологий производства датчиков, позволило их применять в интеллектуальных системах безопасности, к которым относятся системы помощи водителю. В стремлении обеспечить конкурентоспособность своих автомобилей, производители поддерживая передовые технологии, внедряют их на новые машины. Вот о том, какими бывают датчики для систем повышения безопасности при движении автомобиля, мы и поговорим в этой статье.
Содержание
Ультразвуковая технология
В современных системах, помогающих при движении задним ходом и парковке (см. «Системы парковки автомобилей») используются ультразвуковые датчики малой дальности действия (порядка 2,5 м). Они встраиваются в бамперы автомобилей и служат для вычисления расстояний до препятствий с целью контроля пространства при парковке и маневрировании. При приближении к препятствию система выдает водителю звуковые и световые сигналы.
Более новые датчики с дальностью действия до 4,5 м позволяют использовать систему помощи при парковке, которая либо выдает водителю инструкции по оптимальной парковке, либо осуществляет руление при въезде на парковочное место, а водителю остается лишь следить за перемещением автомобиля в продольном направлении.
Конструкция ультразвукового датчика
Ультразвуковой датчик (рис. «Вид ультрозвукового датчика в разрезе» ) состоит из пластмассового корпуса со встроенным штырьковым разъемом, ультразвукового преобразователя (алюминиевого блока с диафрагмой, на внутреннюю часть которой приклеен пьезокерамический элемент) и печатной платы с передающей и оценивающей электроникой. Они электрически соединены с ЭБУ с помощью трех выводов, два из которых — питающие. Третий, служащий в качестве двунаправленной сигнальной линии, используется для активизации функции передачи сигналов и принятия возвращенного сигнала.
Принцип работы ультразвукового датчика
Ультразвуковой датчик принимает от ЭБУ цифровой импульс. Затем электроника заставляет колебаться алюминиевую диафрагму с прямоугольными импульсами на резонансной частоте (около 48 кГц) с типичным периодом порядка 300 мкс, в результате чего испускаются ультразвуковые импульсы. Отраженный от препятствия звук снова заставляет колебаться диафрагму, между тем уже успокоившуюся (прием невозможен в течении периода успокоения, порядка 900 мкс). Эти колебания выводятся пьезоэлектрическим элементом в виде аналогового электрического сигнала, который затем усиливается и преобразуется в цифровой.
Обычно ультразвуковые датчики для описанной области применения имеют селективную характеристику испускания с широким диапазоном чувствительности по горизонтали (для определения как можно большего количества объектов) и узким диапазоном чувствительности по вертикали (во избежание отражений от земли).
Радарная технология на автомобиле
Радарная технология используется, помимо прочего, в адаптивном круиз-контроле (АСС) для определения движущихся впереди автомобилей и соответственной адаптации скорости движения. Излучаемые радаром электромагнитные волны отражаются от металлических поверхностей и других отражающих материалов и затем регистрируются приемной частью радара. Расстояние до объектов в диапазоне чувствительности можно измерить на основании времени распространения этих волн. Для измерения относительной скорости используется эффект Допплера.
Благодаря своим превосходным свойствам в плане быстрого и точного измерения расстояния и относительной скорости радар также очень хорошо подходит для использования в системах активной и пассивной безопасности. Примерами таких систем являются прогнозирующие системы аварийного торможения и раннего распознавания столкновений.
Методы испытаний
Принимаемые сигналы сравниваются с передаваемыми по времени распространения или частоте. Используемые методы значительно различаются по способу сравнения сигналов. Передаваемые волны модулируются, чтобы принимаемый сигнал можно было уникально сопоставить передаваемому. Самыми распространенными формами модуляции являются импульсная, где генерируются импульсы в 10-30 нс, что соответствует длине волны 3-10 м, и частотная, где вовремя передачи мгновенная частота волн изменяется в зависимости от времени.
У всех радарных датчиков измерение расстояния основано на прямом или косвенном измерении времени распространения сигнала с момента его передачи и до момента его приема в виде отраженного сигнала.
Импульсная модуляция
В случае импульсной модуляции измеряется время распространения τ сигнала от его передачи до его приема. Принятый волновой пакет нужно демодулировать, чтобы извлечь нужную информацию. Учитывая скорость света, можно вычислить расстояние до движущегося впереди автомобиля по разности времени. При прямом отражении оно определяется как двойное расстояние d до отражателя, поделенное на скорость света с:
τ = 2d/с
Для расстояния d = 150 м и с ≈ 300 000 км/с время распространения τ≈1,0 мкс.
Импульсный радар испускает очень короткие импульсы. Эти сигналы отражаются от предметов и возвращаются к датчику. Требуется измерить время распространения этих сигналов. На рис. «Блок-схема импульсного радара» показана блок-схема импульсного радара. Генератор с частотой, к примеру, 24 ГГц, передает сигналы на делитель мощности. Его выходные сигналы подаются на два высокоскоростных переключателя в двух каналах, изображенных на схеме. В верхнем тракте (передающем) сигналы от генератора импульсов сначала модулируются и затем выдаются на высокоскоростной переключатель (высокочастотный модулирующий переключатель). Из этого блока сигналы проходят на передающую антенну. В нижнем параллельном тракте (принимающем) регулируемая задержка генерирует опорные сигналы, подаваемые на высокоскоростной переключатель в передающем тракте. Принятый отраженный сигнал смешивается с выходным сигналом генератора, что служит когерентным опорным значением для определения измерений частоты в принятом отраженном сигнале. Когерентность в этом контексте означает, что фаза переданного импульса остается сохраненной в опорном сигнале. Изменение определяется фильтром Допплера.
Излучаемая пиковая мощность в 20 дБм EIRP (уровень мощности при опорном значении 1 мВт) дает расстояние измерения 20-50 м, в зависимости от размера и отражающих свойств данного предмета. Минимальное расстояние измерения составляет около 25 см.
Модуляция FMCW
На рис. «Блок-схема 4-х канального радара с частотно-модулированной незатухающей гармонической волной FMCW» показана блок-схема радара FMCW (частотно-модулированная незатухающая гармоническая волны). Генератор на диоде Ганна в эхорезонаторе или новый генератор на базе SiGe параллельно подает сигналы, к примеру, на четыре патч-антенны, расположенные рядом друг с другом и также служащие для одновременного приема отраженных сигналов. Установленная спереди пластмассовая линза Френеля фокусирует передаваемые и принимаемые лучи, относительно оси автомобиля, в горизонтальном и вертикальном направлениях. Характеристики антенны в плане передачи и приема имеют веерообразную форму в четырех разных направлениях из-за смещения антенн от центра. По расстоянию а до транспортных средств, движущихся впереди, и по их относительной скорости Δv можно оценивать изменение ситуации относительно той, при которой они были обнаружены. Этот метод используется для обнаружения нескольких автомобилей.
Направленные ответвители разделяют передаваемые и принимаемые отраженные сигналы. Путем смешивания частоты приема и частоты передачи, находящиеся далее микшеры переносят частоту приема на более низкие частоты (0-300 кГц). Чтобы оценить их, низкочастотные сигналы оцифровываются и проходят высокоскоростной (гармонический) анализ Фурье для определения частот.
Метод работы разъясняется ниже на примере генератора Ганна. Частота генератора на основе диода Ганна непрерывно сравнивается с эталоном частоты диэлектрического резонансного генератора (DRO) и регулируется до определенной заданной величины. В данном случае напряжение питания диода Ганна изменяется до тех пор, пока частота снова не будет соответствовать заданной. Через эту цепь с обратной связью, с пилообразными колебаниями, частота передачи fs генератора Ганна кратковременно повышается и понижается на 300 МГц каждые 100 мс (частотная модуляция). Сигнал, отраженный от впереди идущей машины, изменяется в соответствии со временем его прохождения, как показано на рис. 4, т.е., при увеличении расстояния до впереди идущей машины — путем понижения частоты, а при уменьшении расстояния — путем повышения частоты fe на ту же величину Δf. Разность частот Δf является прямой мерой расстояния а:
Δf = (fs -fе) = c1·а
(например, с1 = 2 кГц/м).
Если же между двумя движущимися автомобилями будет дополнительная относительная скорость Δv, то принимаемая частота fе увеличивается (при приближении) или уменьшается, на основании эффекта Допплера, как при возрастании, так и при снижении расстояния между машинами пропорционально величине:
Δfd= c2·Δv
(например, с2 = 512 Гц на м/с).
Иными словами, имеются две дифференциальных частоты Δf1 и Δf2. Их сумма соответствует расстоянию между автомобилями, а разность — относительной скорости Δv их движения (рис. «Измерение расстояния и скорости с помощью радиолокационной установки с частотно-модулированной незатухающей гармонической волной FMCW» ). При увеличении расстояния:
Δf1 =fs-fe = Δf-Δfd = c1·а-c2·Δv
При уменьшении расстояния:
Δf2 =fs-fe = Δf+Δfd = c1·а+c2·Δv
Это значит, что:
a= (Δf2 -Δf1)/2c1
Δv = (Δf2 -Δf1)/2c2
Определение угла смещения объекта
Третьей основной величиной, помимо расстояния и относительной скорости, является боковое смещение (угол) объекта. Единственный способ измерить его — путем испускания луча радара в нескольких направлениях. Затем по отраженным сигналам определяется направление, из которого принят самый сильный отраженный сигнал. Чтобы определить угол, под которым радар находит объект, либо направляется один луч (сканирование), либо параллельно испускаются и анализируются несколько лучей.
Для измерения угла требуются не менее двух перекрывающихся лучей. Усиления амплитуд, измеряемых для определенного объекта в соседних лучах, позволяют сделать вывод об угле обзора. На практике сегодня используется четыре луча, с угловым разрешением 1-2°.
Радар малой дальности (24 ГГц)
Используются два типа радаров малой дальности: узкополосные датчики и ультра широкополосные датчики (UWB). Диапазон узкополосных датчиков составляет несколько МГц в диапазоне ISM (промышленность, наука и медицина) при 24 ГГц и они отличаются низкой разделяемостью объектов. Разделяемость объектов у датчика UWB с типичным диапазоном 5 ГГц — высокая, порядка нескольких сантиметров при удаленности объектов около 1,5 м. Функции безопасности, реализованные с помощью датчиков этого типа (например, датчиков раннего распознавания столкновения) требуют коротких циклов измерения, порядка 2 мс и менее.
Диапазон типичных радарных датчиков малой дальности составляет от 2 до 20-50 м, в зависимости от функции помощи водителю.
Датчики этого типа были впервые представлены в 2005 году в системах адаптивного круиз-контроля (АСС) с помощью при движении в пробках. Здесь используются два радарных датчика малой дальности. Если с помощью этой сенсорной технологии потребуется реализовать дополнительные функции, то спереди и сзади автомобиля потребуется установить до четырех датчиков.
Радар большой дальности
Радар большой дальности (LRR), используемый для адаптивного круиз-контроля (АСС), сканирует зону перед движущимся автомобилем на расстояние до 250 м. Рабочая частота 76,5 ГГц (длина волны λ = 3,8 мм) допускает относительно низкопрофильные конструкции, необходимые в автомобилях.
Лидар
Лидары (лазерные локаторы ИК-диапазона) для адаптивного круиз-контроля (АСС) уже несколько лет используются в Японии. В принципе, лидары работают так же, как и радары, но отличаются от последних тем, что используют электромагнитные волны в инфракрасном диапазоне 800-1000 нм, а не микроволны в миллиметровом диапазоне. Лучи лидара могут иногда значительно заглушаться туманом и условиями плохой видимости, особенно брызгами. Это может, соответственно, уменьшить дальность измерения. Поэтому они подходят для систем безопасности хуже, чем радары.
Инфракрасное излучение модулируется по интенсивности, но не по частоте. Блок-схема лидара показана на рис. «Блок-схема лидара«. Лидар создает модулированное инфракрасное излучение, отражаемое от предметов и принимаемое одним или несколькими фотодиодами в датчике. Модуляция может иметь следующие формы: прямоугольные волны, синусоидальные колебания или импульсы. Модулятор передает информацию о модуляции на приемник. Таким образом, принятый сигнал можно сравнить с переданным, чтобы определить либо фазовую разность сигналов, либо время их распространения, и на основании этого вычислить расстояние до объекта. Отношение «сигнал-шум» очень сильно зависит от типа модуляции, наилучшие результаты достигаются при импульсной модуляции. Поэтому импульсная модуляция используется на практике для лидаров большой дальности. Типичные значения длительности импульсов находятся в наносекундном диапазоне. Соответственно, длина импульсов составляет порядка 1 метра. Для достижения точности измерения сантиметрового порядка можно использовать подходящие методы обработки сигналов.
Горизонтальное и вертикальное разрешение достигается либо путем многолучевой конфигурации, либо путем механического сканирования. Преимущество механического сканирования состоит в очень высоком угловом разрешении при использовании всего одного приемно-передающего блока. Лучевое сканирование реализуется либо путем использования поворотного зеркала, либо путем перемещения оптического элемента передатчика или приемника вперед-назад.
В отличие от большинства радарных датчиков, лидар не измеряет непосредственно скорость объекта. Скорость вычисляется путем дифференцирования сигнала расстояния, в результате происходит определенная задержка и ухудшается качество сигнала. С другой стороны, хорошее горизонтальное разрешение сканирующего лидара намного превосходит разрешение типичного современного радарного датчика.
Видеотехнология
Изображения несут в себе наибольшую часть информации, воспринимаемой человеком. Следовательно, очевидным методом в контексте разработки систем повышения безопасности при движении (DAS) является запись изображений, извлечение из них нужных деталей и выявление опасных ситуаций посредством обработки изображений.
На первом этапе на рынок были выведены функции на основе видео — например, систем ночного видения, систем слежения за дорожной разметкой и распознавания дорожных знаков. На втором этапе функции, корректирующие динамику автомобиля через тормоза, рулевое управление и дроссельную заслонку (прежде всего при взаимодействии нескольких датчиков) открывают новые, эффективные перспективы для надежного предотвращения ДТП и смягчения их последствий.
В этом контексте в автомобильной системе выполняются две различные задачи. Когда требуется создать особенно контрастное, яркое изображение, необходимое в системах ночного видения, производится обработка изображения. Затем обработанное изображение выводится непосредственно на дисплей. Вторая задача предусматривает извлечение конкретного содержания изображения с помощью специальных алгоритмов (например, распознавание дорожных знаков). Принятую информацию можно затем использовать для предупреждения водителя сигналами на дисплее или активации соответствующих исполнительных органов.
Основные принципы фотосчитывания
Когда полупроводник освещается фотонами, создаются пары «электрон-дырка». Они, в свою очередь, генерируют электрическое поле, рекомбинируют и создают фотоэлектрический ток. Здесь показатель «квантовая эффективность η» описывает количество пар «электрон-дырка», создаваемых одним фотоном.
Практически все проникающие в полупроводник фотоны преобразуются в электрические заряды. Однако существует сильная спектральная зависимость от средней длины поглощения, в которой возникает это фотопреобразование. Коротковолновый свет в принципе поглощается на поверхности полупроводника, а длинноволновый проникает глубоко внутрь него. Поэтому изображения с большим содержанием волн красного и инфракрасного диапазонов (например, системы улучшения ночного видения) имеют гораздо меньший контраст, чем изображения, записанные в коротковолновой части спектра. Поэтому для систем ночного видения важно обрабатывать изображения в сторону улучшения контрастности. В системах любительского уровня перед камерой часто устанавливаются оптические фильтры для отсечки инфракрасной части спектра.
Фотоэлектрический ток растет пропорционально, на много порядков, падающему световому потоку и строго линеен в широком динамическом диапазоне. Именно это делает полупроводниковые фотодатчики такой привлекательной перспективой для многочисленных систем массового спроса и измерительных систем.
Двумя наиболее важными фоточувствительными полупроводниковыми структурами являются фотодиод (рис. «Фотодиод» ) и металлооксидный полупроводниковый конденсатор (МОП-конденсатор, рис. «МОП-канденсатор, работающий как интегрирующий фотодатчик» ), используемый в ПЗС-датчиках приборах с зарядовой связью. Обе эти полупроводниковых структуры изготавливаются по стандартным полупроводниковым технологиям.
Фотодиод состоит из сочетания полупроводниковых материалов с различными проводящими свойствами. В области пространственного заряда на стыке двух полупроводниковых материалов существует электрическое поле. В то же время область пространственного заряда имеет определенную емкость, обратно пропорциональную ее толщине. Фотодиоды типично заряжаются до определенного потенциала и затем подвергаются воздействию света. Теперь фотоэлектрически генерируемые заряды распространяются по всей области пространственного заряда и накапливаются в фотодиодном конденсаторе. Остаточное напряжение измеряется сразу после облучения фотодиода светом. Разница между этим напряжением и напряжением сброса является мерой падающего света.
МОП-конденсатор (рис. «МОП-канденсатор, работающий как интегрирующий фотодатчик» ) состоит из полупроводникового материала, покрытого тонким оксидным слоем. На оксидный слой наносится металлический проводящий слой. При подаче положительного напряжения на металлический электрод МОП-элемента под изолирующим оксидным слоем создается область пространственного заряда стационарных положительных зарядов. В случае падения света через прозрачный изолированный электрод (переднее облучение) или через подложку (заднее облучение) в этой зоне собираются фотоэлектрически генерируемые электроны без возможности рекомбинирования и опока.
Типичное значение емкости фотодиода и МОП-конденсатора составляет 0,1 фФ/мкм.
ПЗС-матрицы
Для изготовления датчиков формирования изображений многие фотодиоды или МОП-конденсаторы соединяются в матрицы с большим числом пикселов. В то время как выходные сигналы фотодиодов соответствуют мгновенным значениям светового потока (освещенности), следующие две структуры являются, по своей сути, интегрирующими. Их сигнал соответствует общему количеству фотонов, проникших в датчик за время освещения. Такие датчики, в основном, нужны для изготовления линейных или одноплоскостных матриц по принципу ПЗС (приборы с зарядовой связью, CCD).
В случае с этими р-гс-фотодиодами лишь небольшая часть р-я-перехода чувствительна к излучению из-за экрана с вакуумным напылением. Но фотоэлектрически генерируемые заряды распространяются по всей области пространственного заряда и накапливаются там (в МОП-конденсаторе). Когда канальный полевой униполярный МОП-транзистор закрыт, они могут опекать к совместно используемой сигнальной линии (видеовыходу). МОП-транзистором управляет генератор синхронизирующих импульсов через сдвиговый регистр (рис. «Линейное расположение фотодиодов с линией последовательного вывода«). Заряды, последовательно протекающие через видеовыход, являются мерой дозы излучения фотодиодов, активируемых в каждом случае.
Чтобы после облучения можно было сместить измерительный заряд по горизонтали, рядом с освещаемой зоной или коллекторным электродом располагаются дополнительные электроды, как показано на рис. «МОП-конденсатор с задней подсветкой и передающими электродами для переноса заряда«; вовремя интеграционной фазы они находятся на нулевом потенциале. Если затем увеличить потенциал бокового переходного электрода на положительное значение при одновременном уменьшении потенциала коллекторного электрода, то заряд можно сместить на соседний МОП-элемент, защищенный экраном от падения света.
Этот принцип переноса заряда формирует основу приборов с зарядовой связью. Согласно этому принципу аналоговые заряды можно смещать или передавать через многие станции до полного преобразования в конце цепочки преобразований посредством усилителя заряда, к примеру, в сигнал напряжения, который можно подать на быстрый аналогово-цифровой преобразователь.
Этот метод передачи заряда, который можно также рассматривать как аналоговый сдвиговый регистр, обеспечивает простую настройку длинных линейных множественных структур, а также матричных структур. Мельчайший элемент этих структур также называют пикселом (pixel, сокращение от picture element). На данный момент максимально возможное количество пикселов для линейных датчиков составляет около 6000, а у матричных — порядка 2000-2000, т.е. четыре миллиона. Сегодняшние датчики для формирования изображений в автомобилях работают с разрешением менее одного миллиона пикселов. Для более сложных автомобильных систем желательно иметь гораздо большее количество писелов. В камерах уровня потребительской электроники используются датчики с более чем 10 миллионами пикселов.
Размер пикселов, принимающих свет от традиционной линзы для передачи изображений, сегодня варьируется в диапазоне 5-20 мкм. Соответственно, площадь матрицы составляет порядка 1 см2. Если требуется уменьшить размер отдельных пикселов для увеличения разрешения или стоимости матрицы, важно помнить, что повлечет за собой уменьшение количества фотонов, попадающих на пиксел. Таким образом, ограничения по уменьшению размера пикселов диктуются неизбежным ухудшением соотношения «сигнал/шум»; с увеличением разрешения растет уровень цифрового шума.
Ограничивается даже заряд, поглощаемый отдельными, интегрирующими ячейками. При превышении этого предела заряд может «перетечь» в соседние ячейки. Это также называют эффектом расплывания изображения, который в принципе ограничивает динамическую реакцию «светлый/темный» в ПЗС-технологии. Даже с дополнительными мерами против расплывания изображения эту динамическую реакцию едва удается увеличить сверх величины около 50 дБ без дополнительных мер, таких как регулируемые экран и время выдержки.
Как показано на рис. «Принцип работы ПЗС-матрицы«, создаваемые в фотодиоде фотоэлектрические заряды сначала смещаются из зоны экспозиции посредством перемещающихся электродов и управляющих сигналов в сторону, в столбцовую структуру. Затем заряды всех столбиков по тому же принципу одновременно смещаются вниз, где они рядами перетекают в горизонтальный «сдвиговый регистр». Оттуда они последовательно считываются и обрабатываются.
Сегодня ПЗС-матрицы — наиболее распространенная полупроводниковая технология с датчиками для формирования изображений. Однако ограниченная реакция «светлый/темный», относительно высокая потребляемая мощность по сравнению с другими технологиями при трех разных рабочих напряжениях, и ограниченный диапазон температур не позволили им получить широкого распространения в автомобилях.
КМОП-матрицы
Сегодня КМОП-матрицы являются более перспективным решением по сравнению с ПЗС-матрицами, и уже широко используются во многих областях. Здесь понятие «КМОП- матрица» может внести путаницу, потому что КМОП (сокращение от «комплементарный металлооксидный полупроводник») — это особая полупроводниковая технология. С другой стороны, ПЗС-матрица тоже содержит МОП-структуры (структуры металлооксидных полупроводников). КМОП-матрицы существенно отличаются от ПЗС-матриц не только технологией изготовления, но и рядом особенностей.
Пикселы здесь считываются не последовательно, а по аналогии с ячейкой памяти в оперативном запоминающем устройстве, могут активироваться по-отдельности, так как расположены в матричной структуре. С этой целью для каждого пиксела также интегрирована активная электроника (APS, активный датчик пиксела).
Интегрирующие фотодиоды не используются. Вместо них используются те, что в большой степени не зависят от времени выдержки.
Значения яркости не пропорционально преобразуются в электрические сигналы, а логарифмируются. Поэтому они имеют схожую характеристику с человеческим глазом. Только это позволило увеличить динамическую реакцию «светлый/темный» до более чем 100 дБ без дополнительных мер.
КМОП-матрицы реализуются не на основе стандартной КМОП-технологии. Вместо этого используется КМОП-технология, оптимизированная до фотоэлектрического элемента, который, благодаря гораздо меньшей потребляемой мощности, чем у ПЗС-матриц, позволяет добавлять на матричный чип другую активационную и оценочную электронику.
Поскольку время доступа к отдельным пикселам составляет порядка нескольких десятков нс, КМОП-матрицы допускают несколько более высокую частоту смены кадров, особенно при использовании возможности считывания только фрагментов изображения (субфрейминг), чего не позволяют сделать ПЗС-матрицы.
На рис. «КМОП-матрица» показан фрагмент структуры КМОП-матрицы. Отдельный пиксел состоит из фотодиода и канального полевого униполярного МОП-транзистора (M0SFET) в качестве переключающего элемента. Каждый пиксел можно индивидуально активировать и считывать с него сигналы через матричную структуру.
Все фотодиоды заряжаются до противодействующего напряжения смещения величиной около 5 В. Отдельные пикселы разряжаются до определенного напряжения под влиянием падающего света. Сигнал пискеля считывается путем активации соответствующих формирователей строк и столбцов, в результате чего создается проводное соединение от пиксела к выходному усилителю. Затем пиксел снова заряжается через это соединение до исходного противодействующего напряжения. Усилитель измеряет необходимый заряд для каждого пиксела. Это точно соответствует фотозаряду, накопленному пикселом. Таким образом, каждый пиксел можно считывать индивидуально, а время выдержки можно определить через внешнюю схему выборки адреса.
Эта APS-технология, при которой в матрицу интегрируется транзистор MOSFET, обеспечивает низкий уровень шумов. Самый простой пиксел APS состоит из фотодиода и трех MOSFET. Fla рис. «Схема пиксела HDRC в разрезе» схематично изображена структура пиксела HDRC (КМОП — технология с расширенным динамическим диапазоном). Светочувствительным элементом этого варианта КМОП-матрицы является фотодиод, поляризованный в направлении блокировки, последовательно соединенный с р-канальным МОП-транзистором (М1), работающим ниже напряжения открывания. Диодный ток, пропорциональный освещенности, также должен протекать через блокированный транзистор. Напряжение его потокового перехода UGs в широком диапазоне практически идеально логарифмически зависит от протекающего фототока. Два других транзистора М2 и М3 служат для развязки сигнала, подаваемого через мультиплексор на быстрый 10-битный аналого-цифровой преобразователь.
Технология определения дальности
Формирователи изображений для определения дальности — это датчики, все еще находящиеся на стадии разработки, сочетающие характеристики лидаров и видеокамер. Их можно считать видеодатчиками с дополнительной функцией измерения расстояния до ближайшего объекта каждым пикселом камеры. Наиболее известной технологией в современном автомобилестроении является фотонное смешивающее устройство (PMD).
Находящийся перед автомобилем объект подвергается модулированному облучению светодиодами в диапазоне, близком к инфракрасному. Для принятого фоточувствительным датчиком сигнала также оценивается время его распространения. Это создает трехмерное изображение окружающей автомобиль обстановки. Если все еще существующие проблемы можно преодолеть, то технологию PMD следует рассматривать как серьезную альтернативу другим датчикам в коротком и среднем диапазонах дальности.
В следующей статье я расскажу о мехатронике.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Автомобильные датчики и их функции
Автомобильные датчики и их функции могут показаться сложными, но это простой способ убедиться, что основные системы в вашем автомобиле работают без сбоев. Эти датчики контролируют все, от уровня кислорода до расхода воздуха и температуры охлаждающей жидкости двигателя. Вот пять автомобильных датчиков и их функции, которые помогут вам лучше понять, как работает ваш двигатель.
Датчик кислорода (O2)
Вашему двигателю нужен кислород, но слишком много или слишком мало кислорода может вызвать проблемы.Эти датчики измеряют уровень кислорода в выхлопных газах вашего автомобиля и сравнивают его с количеством кислорода в воздухе вокруг вашего автомобиля.
Определяет соотношение топлива и воздуха в вашем двигателе, которое называется соотношением топлива. Он используется компьютером двигателя, чтобы видеть, правильно ли дозируется топливо. Если это важное соотношение нарушено при слишком большом или слишком малом количестве топлива, ваша машина может работать не так эффективно. Это может вызвать проблемы с производительностью и чрезмерное загрязнение.
Датчик массового расхода воздуха (MAF)
Этот датчик работает вместе с датчиком кислорода, чтобы убедиться, что ваш двигатель имеет правильное соотношение топлива.Пока датчик кислорода находится в выхлопной системе, датчик массового расхода воздуха расположен рядом с воздушным фильтром и отслеживает, сколько воздуха поступает в двигатель. Если ваш датчик массового расхода воздуха выходит из строя, вы можете заметить резкую работу на холостом ходу или глохнет, и может загореться индикатор двигателя.
Датчик абсолютного давления в коллекторе (МАР)
Датчик абсолютного давления в коллекторе также измеряет воздух, поступающий в двигатель, но другим способом. В то время как датчик массового расхода воздуха измеряет расход воздуха, датчик MAP измеряет плотность воздуха.Эта информация используется компьютером вашего двигателя для регулировки количества топлива, используемого в процессе сгорания, и поддержания оптимального соотношения топлива и воздуха.
Датчик частоты вращения двигателя
Датчик частоты вращения коленчатого вала измеряет частоту вращения коленчатого вала в оборотах в минуту или об / мин. Это не то же самое, что измерение скорости автомобиля — это измеряется датчиком скорости автомобиля. Датчик частоты вращения двигателя показывает только частоту вращения двигателя и используется для контроля общей производительности автомобиля.Если он не работает должным образом, у вас могут быть проблемы со спидометром или функцией круиз-контроля.
Датчик температуры охлаждающей жидкости (CTS)
Как следует из названия, этот датчик отслеживает температуру охлаждающей жидкости вашего двигателя. Он использует эту информацию для регулирования других систем, которые помогают должным образом охлаждать ваш двигатель, например охлаждающего вентилятора. Если этот датчик неисправен, ваш двигатель может перегреться, что является серьезной проблемой. В этом случае загорится индикатор проверки двигателя, чтобы предупредить вас о том, что вам следует отремонтировать двигатель и воздержаться от вождения.
Это всего лишь несколько автомобильных датчиков и их функции, которые помогут вам лучше понять ключевые компоненты, обеспечивающие бесперебойную работу вашего автомобиля. Полный список датчиков длинный, и все они работают вместе в фоновом режиме, чтобы ваш двигатель работал безопасно и эффективно, чтобы вы могли заниматься своими делами.
Проверьте все реле, датчики и переключатели
Фотографии любезно предоставлены Flickr.
Николь Вакелин освещает автомобильную промышленность в качестве независимого журналиста для различных изданий. Ее работа включает в себя новости, подкасты, радио, письменные обзоры и видеообзоры. Ее можно найти в The Boston Globe, CarGurus, BestRide, US News and World Report и AAA, а также в блогах о стиле жизни, таких как Be Car Chic, The Other PTA и She Buys Cars.Она активна в социальных сетях, у нее много подписчиков как в Twitter, так и в Instagram, и в настоящее время она является вице-президентом Ассоциации автомобильной прессы Новой Англии.
.Масштабируемая платформа для тестирования автономных транспортных средств с отслеживанием траектории
С появлением автономных транспортных средств, в частности их адаптируемости к суровым условиям, исследования и разработки автономных транспортных средств привлекают значительное внимание не только академических кругов, но и практикующие. Из-за высокого риска, высокой стоимости и сложности тестирования автономных транспортных средств в суровых условиях была предложена масштабируемая платформа с аппаратным обеспечением (HIL), поскольку это безопасный, недорогой и эффективный метод тестирования.Эта платформенная система состоит из масштабируемого автономного транспортного средства, масштабируемой проезжей части, центра мониторинга, устройства передачи, устройства позиционирования и компьютеров. В этой статье используется случай процесса разработки управления слежением для высокоскоростного разворота для построения функции управления слежением. Кроме того, для построения симуляционного теста были рассмотрены упрощенная модель динамики транспортного средства и алгоритм отслеживания траектории. Результаты эксперимента демонстрируют эффективность масштабируемой платформы HIL.
1.Введение
Автономные транспортные средства, также известные как беспилотные транспортные средства или автомобили без водителя, способны определять транспортную среду, перемещаться с помощью программного алгоритма и управлять движением транспортного средства без решений и действий водителя. Такие транспортные средства широко используются в логистике и транспортировке грузов, в военных целях и при исследовании планет из-за их большой потенциальной способности повышать безопасность, увеличивать возможности транспортировки и минимизировать загрязнение [1–8].За последние 40 лет разработка автономных транспортных средств значительно увеличилась. Недавно Google, Tesla, Uber и Baidu продемонстрировали свои автономные автомобили, которые могут ездить по различным дорогам компании с живым движением [9]. Таким образом, с решением технологических, социальных и правовых вопросов люди наконец освободятся от умственного и физического бремени вождения [4].
Хотя автономные транспортные средства имеют много преимуществ, несколько недавних аварий замедляют процесс их коммерциализации.Tesla отменила пропаганду функции автономного вождения, а Uber также прекратил все испытания автономных транспортных средств. В действительности и правительство, и академические круги пришли к соглашению о том, что автономное транспортное средство должно проходить всесторонние, систематические и строгие испытания, прежде чем оно будет официально введено в продажу. Однако испытание автономного транспортного средства требует чрезвычайно трудоемких работ и огромных экономических затрат [10]. Автономное транспортное средство состоит из пяти функций (как показано на рисунке 1): систем обнаружения и определения местоположения; глобальное планирование маршрута; рассуждение о поведении; планирование траектории; управление отслеживанием траектории.Среди этих пяти функций первые четыре могут быть смоделированы и протестированы с использованием данных, собранных с датчиков автономного транспортного средства. По сути, это проверка программной функции автономных транспортных средств. Однако процесс управления отслеживанием траектории должен быть протестирован на реальных транспортных средствах в качестве кинематических и динамических ограничений транспортного средства; Скорость отклика контроллера влияет на надежность, плавность и комфорт автономных транспортных средств. Для функции управления отслеживанием траектории требуется, чтобы алгоритм управления мог обеспечивать пространственное планирование пути и обрабатывать направление / скорость транспортного средства в соответствии с информацией о дорожном движении в реальном времени и картографической информацией высокой точности [10].
Два основных существующих подхода к тестированию автономного отслеживания траектории транспортного средства — это моделирование и тестирование реальных транспортных средств. Хотя программное моделирование имеет преимущества низкой стоимости и высокой эффективности, имитационная модель основана на идеальной математической модели, которая игнорирует многие практические факторы, которые могут вызвать большую разницу между результатами моделирования и результатами реальных случаев. Следует отметить, что тестирование в реальном мире, хотя и имеет гораздо более высокую точность, требует очень много времени, дорого и ограничено погодными условиями и сценариями [11–13].В связи с этим было затронуто сокращение цикла разработки без ущерба для точности и надежности [14]. В мире существует множество хорошо известных испытательных стендов для тестирования подключенных и автоматизированных транспортных средств, таких как MCity Мичиганского университета и испытательный полигон GoMento, расположенный в округе Контра Коста, Калифорния, и испытательный стенд CU_CVIS Университета Чанъань в Китае. Первые два испытательных стенда предназначены для демонстрации приложений будущих интеллектуальных транспортных систем. CU_CVIS фокусируется на тестировании метафункций для каждой части CAV и всестороннем тестировании производительности в предельных условиях [15].
Аппаратное моделирование (HIL) объединяет математические и механические модели для имитации реальных транспортных средств с учетом влияния силы тяжести, сопротивления и трения, которые могут привести к неточности модели. По сравнению с тестированием в системе реального трафика, HIL имеет преимущество низкой стоимости строительства, короткого цикла разработки и воспроизводимого метода [16]. В настоящее время моделирование на основе HIL широко используется в области автомобильных испытаний. Deng et al. [17] предложил систему моделирования HIL как неотъемлемую часть различных программ автономного вождения, которая представляет собой лабораторную среду для поддержки разработки, тестирования и проверки многих функций и алгоритмов, связанных с управляемым датчиками автономным вождением.Zulkefli et al. [18] предложили испытательный стенд HIL для оценки производительности подключенных транспортных средств. Этот испытательный стенд интегрировал лабораторную платформу для исследования трансмиссии с микроскопическим симулятором дорожного движения (VISSIM), который можно было использовать для тестирования различных приложений ITS, таких как CACC, Eco-Driving и Speed Harmonization. Gietelink et al. [19] разработали внутреннюю систему моделирования аппаратного обеспечения транспортного средства для тестирования усовершенствованных систем помощи водителю, встроенных в реальный автомобиль. Насколько нам известно, большинство симуляторов на основе HIL включают автомобиль или его части в систему, что обычно является сложным и дорогостоящим, а также требует большого пространства.Исследовательская группа из RWTH Ахенского университета, Германия, предложила аппаратную реализацию взвода из четырех грузовиков в масштабе 1: 14 для тестирования алгоритма кооперативного управления взводом [20]. Что касается критических факторов безопасности, система моделирования HIL также используется для оценки угроз до разрушения [21].
В предлагаемой статье представлена масштабируемая платформа HIL для тестирования автономного отслеживания траектории транспортного средства (PaTAVTT), которая представляет собой мехатронный испытательный стенд, состоящий из масштабируемой проезжей части, масштабируемых транспортных средств, подсистемы внутреннего позиционирования и компьютерных графических интерфейсов пользователя.По сравнению с другими тест-системами HIL, PaTAVTT имеет следующие преимущества. Во-первых, он оснащен сверхширокополосной (UWB) в помещении высокоточной системой позиционирования, которая соответствует точности GPS на открытом воздухе, что позволяет записывать точную траекторию движения масштабируемого транспортного средства. Отклонение между реальной траекторией и эталоном могло бы быть важным критерием для оценки эффективности алгоритма отслеживания траектории. Во-вторых, масштабируемая платформа соединяет программную модель динамики транспортного средства с реальным транспортным средством.Модули алгоритмов и параметры, проверенные Matlab или Carsim, могут быть загружены в весы. После прохождения тестов на PaTAVTT алгоритмы могут быть в дальнейшем перенесены на реальный автомобиль. В-третьих, многие внешние факторы, такие как материал дорожного покрытия, геометрия дороги и ее уклон, а также статические или динамические препятствия, могут быть проверены из-за низких затрат на установку и испытания.
В этой статье была описана системная структура этой платформы HIL и реализация каждого подмодуля.Кроме того, была разработана и протестирована новая методология разворота, которую также можно использовать в автономном транспортном средстве. Результаты тестирования демонстрируют, что платформу HIL можно использовать для тестирования планирования траектории и управления отслеживанием автономного транспортного средства, что потенциально сокращает цикл его разработки. Остальная часть статьи организована следующим образом. Раздел 2 — это обзор ПаТАВТТ. Раздел 3 представляет реальный пример и методологию разворота. Результаты моделирования представлены в разделе 4.Раздел 5 завершает статью.
2. Обзор PaTAVTT
В этой статье PaTAVTT состоит из масштабируемой проезжей части, системы позиционирования, масштабируемого транспортного средства, системы трансмиссии и программного симулятора. Как видно на рисунке 2, проезжая часть в масштабе представляет собой платформу со скругленными прямоугольниками, имеющую две полосы движения, ширина каждой полосы которой составляет 37,5 см. Кроме того, масштабные дороги имеют различные виды дорожной инфраструктуры, такие как дорожные знаки и светодиодные информационные табло.
(a) Структурная схема платформы
(b) Снимок платформы
(a) Структурная схема платформы
(b) Снимок платформы
Транспортные средства в масштабе 37 см в длину, 30 см в ширину и 14 см в высоту.Масштабируемое транспортное средство питается от аккумулятора, его максимальная скорость составляет 3 м / с. Система позиционирования производится Ubsense на основе технологии беспроводной связи UWB, которая состоит из антенны позиционирования, установленной на стене, и этикетки на транспортном средстве. Его точность позиционирования составляет около 30 см, что примерно равно длине весов. На данный момент он соответствует точности позиционирования GPS, которая имеет точность 3–5 м и близка к длине реального транспортного средства. Каждое масштабируемое транспортное средство оснащено двумя контроллерами и двумя центральными процессорами (ЦП): один ЦП используется для управления рулевым управлением автомобиля; другой используется для обработки выходных данных от четырех типов датчиков (датчик позиционирования СШП, ультразвуковой датчик расстояния, датчик камеры / изображения и фотоэлектрический кодировщик; см. рисунок 3).Ультразвуковые датчики расстояния используются для определения местоположения впереди идущего автомобиля или препятствий для предотвращения столкновений. Датчик изображения используется для определения полосы движения, чтобы убедиться, что автомобиль движется по полосе. Фотоэлектрический кодировщик используется для измерения скорости и перемещения транспортного средства.
(a) Структурная схема масштабируемого транспортного средства
(b) Масштабируемая автономная машина
(a) Структурная схема масштабированного транспортного средства
(b) Масштабируемая автономная машина
Система беспроводной связи реализована с использованием 802.Беспроводная технология Wi-Fi 11ac. В умные автомобили устанавливаются модули Wi-Fi. Вся беспроводная связь подключается к сетевому маршрутизатору через интранет. Следует отметить, что система способна моделировать стратегии управления / оптимизации траектории.
Платформа PaTAVTT может использоваться для тестирования различных типов функций управления отслеживанием автономных транспортных средств, таких как управление одиночным транспортным средством и управление взводом. Пожалуйста, обратитесь к Таблице 1 для получения подробной информации.
| ||||||||||||||||||||||||||||||||
3.Пример использования U-Turn
3.1. Разворот и его негативное влияние на динамику движения
Разворот — это распространенный сценарий движения, который снижает скорость транспортного средства и влияет на транспортный поток. Знаки разворота из разных стран показаны на рисунке 4. Это может привести к боковому скольжению или переворачиванию, если транспортное средство ускоряется при развороте [22]. Поскольку автономные транспортные средства могут автоматически планировать траектории и управлять ими, правильный алгоритм разворота может значительно повысить общую эффективность движения, снизить расход топлива и минимизировать другие негативные эффекты.
На основе платформы PaTAVTT в данном документе в качестве примера используется отслеживание траектории разворота и строится модель динамики автономного транспортного средства. Мы используем алгоритм управления прогнозированием модели (MPC) для выполнения и тестирования управления отслеживанием траектории автономных транспортных средств в сценарии разворота при различных скоростях.
3.2. Vehicle Dynamics Model
Управление отслеживанием траектории автономных транспортных средств достигается за счет управления системой функций транспортного средства.Математическая модель динамики транспортного средства полезна при проектировании транспортных средств, моделировании аварий и анализе кинематического поведения, поскольку она обеспечивает быстрый анализ моделирования по сравнению с моделями конечных элементов (FE) [23]. В связи с этим в этой статье мы используем модель динамики транспортного средства в качестве модели прогнозирования, а модель динамики автономного транспортного средства может быть упрощена как модель двухколесного велосипеда.
В плоской декартовой системе координат () модель динамики транспортного средства показана на рисунке 5. и представляют собой центральные координаты задней и передней оси транспортного средства, соответственно.и — скорость заднего и переднего мостов автомобиля соответственно. — направление движения автомобиля, — угол переднего колеса, — колесная база между передней и задней осью.
Из рисунка 5 у нас
.Функция рецептора и реакция полупроводникового газового датчика
Описаны теоретические подходы к функции рецептора и реакции полупроводникового газового сенсора после иллюстраций некоторых важных вопросов, таких как туннельный транспорт. Истощение малых полупроводниковых кристаллов характеризуется возникновением истощения нового типа (истощение объема) после обычного (региональное истощение), и включение обоих типов позволяет сформулировать рецепторную функцию и реакцию на кислород (воздушная основа), окисляющий газ. (диоксид азота) и восстановительный газ (водород).Уравнения, полученные теоретически с использованием физических параметров полупроводниковой стороны и химических параметров газовой стороны, по-видимому, удовлетворительно воспроизводят поведение чувствительности к вышеупомянутым газам, а также влияние изменений физических параметров, таких как размер зерна и плотность доноров. Распространение на полупроводниковые кристаллы, диспергированные с поверхностными ловушками электронов, показывает, что ловушки действуют как сенсибилизатор, способствуя отклику сенсора.
1. Введение
Полупроводниковый датчик газа (далее именуемый устройством) обладает электрическим сопротивлением, образованным пористой сборкой крошечных кристаллов металлооксидного полупроводника n-типа, обычно SnO 2 , In 2 O 3 или WO 3 .Кристаллы часто содержат небольшое количество посторонних веществ (благородных металлов или их оксидов), называемых сенсибилизатором. При работе при соответствующей температуре воздуха резистор резко меняет свое сопротивление при контакте с небольшой концентрацией восстановительного газа или окисляющего газа, что позволяет нам определить концентрацию по изменению сопротивления. На его открытии с докладом Seiyama et al. [1] и патента Тагучи [2], эта группа датчиков была подвергнута огромному количеству исследований и разработок во всем мире, направленных на улучшение характеристик обнаружения и расширение для новых приложений.Благодаря этим исследованиям группа не только выросла, чтобы предоставить важные инструменты для обнаружения и / или контроля газов в различных местах современного общества, но также стала пионером в создании новой области технологий, в которой устройства называются химическими датчиками. Точнее говоря, полупроводниковые газовые сенсоры подразделяются на два подтипа: поверхностно-чувствительный тип, работающий при температурах ниже 500 ° C, и чувствительный к объему, работающий при высокой температуре (обычно при 800 ° C) [3]. Эта статья касается только первого типа.
Помимо таких замечательных достижений в практических приложениях, базовые представления об этой группе сенсоров вряд ли были удовлетворительными, несмотря на огромные усилия стольких исследователей, которые обобщены в обзорах [5–8]. Отчасти это связано с тем, что на чувствительные свойства влияет множество сложных факторов. Важен не только выбор подходящего оксидного полупроводника, но и методы и условия изготовления сенсорных устройств оказывают сильное влияние на газочувствительные свойства за счет изменений плотности доноров, размера кристаллитов, геометрии контакта между кристаллами, плотности упаковки (или пористости), упаковки толщина и т. д. [7].Кроме того, сенсорные свойства часто в значительной степени изменяются при загрузке посторонними веществами, такими как сенсибилизаторы. Понимание этих явлений действительно потребовало междисциплинарных знаний в области физики полупроводников, химии поверхности, химии твердого тела и так далее. Чтобы облегчить понимание, мы предложили предположить, что сенсорные свойства определяются тремя основными факторами, а именно функцией рецептора, функцией преобразователя и фактором полезности, как схематично показано на Рисунке 1 [4].Первый фактор связан с тем, как каждый из составляющих кристаллов реагирует на окружающую атмосферу, содержащую кислород и целевые газы (проблема внутри частиц). Единодушно считается, что кислород адсорбируется на кристаллах как отрицательно заряженные частицы, что сопровождается образованием обедненного слоя внутри кристаллов. Целевые газы нарушают равновесие за счет конкурентной адсорбции или реакции с адсорбированным кислородом. Предполагается, что посторонние вещества, такие как сенсибилизаторы, диспергированные на кристаллах, так или иначе влияют на эти процессы.Второй фактор связан с тем, как отклик каждой частицы преобразуется в отклик всего устройства, и, по-видимому, это связано с механизмом переноса электронов между соседними кристаллами (проблема между частицами). В течение долгого времени модель двойного барьера Шоттки [9], которая предполагает миграционный перенос электронов через барьер, как показано, пропагандировалась для этого процесса без критической проверки. Третий связан с ослаблением отклика из-за эффекта диффузии и реакции активных целевых газов через поры сборки кристаллов (проблема сборки) [10–12].Приведенная схема довольно хорошо объяснила качественную природу полупроводниковых газовых сенсоров по нескольким параметрам. Однако он не смог дать количественного понимания и, что наиболее важно, дать новое понимание, ведущее к инновациям в этой группе датчиков. В схему должны были быть включены некоторые серьезные дефолты, особенно в отношении функций рецептора и преобразователя.
К счастью, несколько лет назад мы столкнулись с интересным открытием, что тонкопленочные устройства, изготовленные из гидротермально приготовленных коллоидных суспензий SnO 2 методом центрифугирования, демонстрируют практически независимые от температуры сопротивления на воздухе в диапазоне температур 150–400 ∘C, как показано на рисунке 2 [13].Такое тепловое поведение сопротивлений вряд ли согласуется с упомянутой выше моделью двойного барьера Шоттки. Вместо этого настоятельно рекомендуется туннельный перенос электронов через контакты (или зазоры) между соседними кристаллами. Кроме того, этот транспортный механизм значительно упростил недавно проведенное теоретическое моделирование функций рецептора и преобразователя [14–16], поскольку составляющие кристаллы теперь можно рассматривать независимо друг от друга. Как было выявлено в ходе этого процесса, истощение мелких кристаллов легко выходит за рамки обычного (региональное истощение) и переходит в новый тип (истощение объема).Очевидно, что именно недостаток такой информации задерживает фундаментальное понимание этой группы датчиков, поскольку большинство их ценных свойств обнаружения газа проявляются на стадии истощения объема или поблизости.
В этом обзоре мы попытаемся описать наши теоретические подходы к полупроводниковым датчикам газа. После краткого описания некоторых экспериментальных фактов, теоретически важных, как сформулировать рецепторную функцию и реакцию больших и малых составляющих кристаллов на кислород, диоксид азота и водород, подробно описывается с последующим сравнением с некоторыми экспериментальными данными.Также включено недавнее расширение [17], проведенное для понимания сенсибилизирующего эффекта, оказываемого электроноакцепторными веществами.
2. Основные вопросы, связанные с датчиками газа SnO2
2.1. Адсорбция кислорода на SnO 2
Адсорбция кислорода на оксидах отдельных металлов была исследована Ивамото с помощью метода TPD около 40 лет назад [18]. Он классифицировал переход оксидов металлов на три группы в зависимости от того, было ли количество кислорода, адсорбированного и десорбируемого обратимо в диапазоне температур от комнатной температуры до 500 ° C, большим (Группа A), малым (B) или необнаруживаемым (C).Группа A состояла из оксидов p-типа, тогда как некоторые из оксидов n-типа, такие как SnO 2 , ZnO и In 2 O 3 , принадлежали к B, а другие, такие как WO 3 и V . 2 O 5 принадлежал C. Это наводит на мысль, что Группа B состоит из типичных оксидов, используемых для полупроводниковых газовых сенсоров.
Адсорбция кислорода на SnO 2 была исследована более подробно нашей группой, также с использованием метода TPD, но для расширенного диапазона температур до 600 ° C.Результаты показаны на рисунке 3 [19]. Всего существует четыре типа кислорода, 𝛼1, 𝛼2, 𝛽 и 𝛾 , , которые, как известно, десорбируются из SnO 2 . Из них только два последних типа, (предположительно O-) и 𝛾 (кислород решетки O2-), десорбируются в диапазоне температур выше 400 ° C после того, как кислород адсорбируется во время охлаждения от 600 ° C или при фиксированной температуре. температура 400∘C. С другой стороны, после адсорбции кислорода в более низком температурном диапазоне (ниже 155 ° C) только 1 (нейтральный молекулярный O 2 ) и 2 ( супероксид-ион O − 2) десорбируются при температуре диапазон до 250∘C.Очевидно, что эти молекулярные адсорбаты образуются только тогда, когда другие диссоциированные частицы отсутствуют. Также очевидно, что при обычных рабочих температурах сенсора (обычно 300–400 ° C) на поверхности SnO 2 преобладают 𝛽 частицы. Было показано, что степень адсорбции этого вещества довольно мала (менее 1% покрытия поверхности), что позволяет предположить, что его адсорбция ограничена поступлением электронов. Позже был опубликован отчет, в котором 𝛽 отождествлялся с O2− [20]. Однако это определение не может хорошо вписаться в теоретический анализ реакции на кислород.Таким образом, предполагается, что он будет O- в следующих обработках.
2.2. Влияние размера зерна
Около двадцати лет назад мы исследовали экспериментальные методы получения мелких зерен (кристаллитов) SnO 2 . В ходе этого исследования мы обнаружили заметные эффекты размера зерна [21]. Как показано на Рисунке 4, было обнаружено, что сопротивление на воздухе (основание), а также при воздействии H 2 или CO в воздухе, 𝑅𝑎 и 𝑅𝑔, соответственно, резко возрастает по мере того, как размер зерна (𝑑𝑚) уменьшается сверх критического значения. значение (𝑑𝑐), тогда как реакция сенсора на H 2 или CO, 𝑅𝑎 / 𝑅𝑔, также увеличивалась, хотя и более постепенно, по мере уменьшения 𝑑𝑚.Интуитивно мы чувствовали, что эти явления связаны с завершением истощения целой области составляющих зерен. Наша интерпретация (или предположение) заключалась в том, что будет совпадать с удвоенной толщиной глубины истощения и что уменьшение 𝑑𝑚 за пределами этой точки будет отвечать за резкое увеличение, 𝑅𝑔 и 𝑅𝑎 / по некоторым, пока неизвестным причинам. Позже аналогичные размерные эффекты наблюдались также для реакции ламеллярных или гранулированных устройств на основе WO 3 на NO 2 , как показано на рисунке 5 [22].
Хотя казалось, что такие эффекты размера зерна хорошо согласуются с моделью двойного барьера Шоттки, их реальное значение долгое время оставалось открытым. Некоторые исследователи пытались объяснить размерные эффекты [23–26]. Среди них Ротшильд и Комен указали, что размерные эффекты можно объяснить как отражение изменений в соотношении площадь поверхности / объем составляющих зерен SnO 2 [23, 24]. Оказалось, что такая ситуация обычно возникает на стадии истощения объема в настоящей теории, как упомянуто ниже.
2.3. Возможность туннельного транспорта
В сенсорных устройствах составляющие кристаллы соединены с соседними либо контактами, либо шейками, пропорция которых зависит от методов и условий изготовления устройства. В случае, если устройство изготавливается мокрым способом, обычно преобладают контактные соединения, как показано на Рисунке 6 [13]. В таких случаях легко понять, что сопротивление устройства определяется как сумма сопротивлений каждого контакта.Эта идея уже была задумана в модели двойного барьера Шоттки, которая предполагает, что электроны мигрируют через барьер на контакте. Однако эта модель не может соответствовать практически независимому от температуры поведению, показанному на рисунке 2, как уже упоминалось. Исходя из этого, мы исследовали возможность туннельного транспорта электронов [13]. Используемая модель туннелирования показана на рисунке 7. Высота туннельной стенки устанавливается равной сродству кристаллов к электрону, то есть разности потенциальной энергии (potential) между уровнем вакуума и краем зоны проводимости. на поверхности, а толщина задается равной зазору (𝐿) между соседними кристаллами.Если 𝑉 известно, вероятность туннелирования (𝑃) электрона с энергией 𝐸 выше края зоны проводимости может быть оценена как функция с помощью хорошо установленного уравнения. Сообщается, что работа выхода SnO 2 распределена между 4,7 и 5,7 эВ [27, 28], в то время как донорные уровни расположены неглубоко от края зоны проводимости. Следовательно, принимает максимальное значение около 5,7 эВ. Вероятность туннелирования, оцененная таким образом в предположении = 6 эВ, показана на рисунке 8. Когда зазор равен нулю (контакт), естественно равно единице независимо от 𝐸.Резко уменьшается с увеличением 𝐿 и уменьшением 𝐸, но, в частности, он все еще сохраняет значимое значение (0,01 или выше) при = 0,1 нм и 𝐸 = 0,03 эВ. Учитывая, что тепловая энергия составляет 51,7 мэВ при 600 К, понятно, что электроны могут туннелировать через такой зазор со значительной вероятностью. Это означает, что электроны, выведенные термически, могут переноситься путем туннелирования не только через область прямого контакта (= 0), но также через небольшой зазор в ее окрестностях, как схематично показано на рисунке 9.Отсюда следует, что даже в случае точечного контакта (контакт с нулевой площадью) электроны могут переноситься путем туннелирования, но не путем миграции. Как показано на рисунке 7, 𝑉 поддерживается на одном и том же значении как в состоянии плоской полосы (a), так и в состоянии изогнутой полосы (b). Таким образом, вероятность туннелирования остается одинаковой в обоих случаях, только количество вовлеченных электронов уменьшается по мере изгиба зон. Таким образом подтверждается возможность туннельного механизма для переноса электронов между соседними кристаллами.Нет причин исключать это. Скорее, он может даже устранить трудности, с которыми сталкивается механизм миграции.
2.4. Модели переноса электронов между зернами
Механизм переноса электронов между соседними кристаллами напрямую связан с функцией датчиков датчиков. Вероятно, существует три типичных модели, как схематически изображено на рисунке 10. Сферические кристаллы (однородные по размеру), связанные с соседями через контакт или шейку, считаются обедненными электронами только во внешней области.Модель двойного барьера Шоттки (а) является традиционной. Предполагается, что электроны переносятся из необедненной (остовной) области одной сферы в другую за счет миграции за барьер между ними. Высота барьера не только определяет проводимость соприкасающейся части, но также вызывает энергию активации проводимости при изменении температуры. Модель туннельного транспорта (b) предполагает, что электроны, расположенные на периферии одной сферы, переносятся на периферию другой сферы путем туннелирования через небольшой зазор (обычно 0–0.1 нм) между ними. Проводимость пропорциональна плотности электронов на периферии, которая определяется высотой поверхностного барьера. При изменении температуры энергия активации не связана с проводимостью при условии, что высота барьера остается неизменной. Модель шеи (или канала проводимости) (c) предполагает, что электроны мигрируют через канал проводимости, который образован путем соединения областей сердцевины соседних сфер. Ширина канала сужается в частях шейки, так что проводимость определяется геометрическим соотношением между размером шейки и глубиной истощения.Из этих моделей (а) и (с), хотя на первый взгляд кажутся вероятными, не всегда свободны от различных трудностей. Вероятно, самый серьезный из них появляется после того, как глубина истощения достигает радиуса сфер или шейки. Такая ситуация может легко произойти при уменьшении размеров сфер или усилении адсорбции газа. Обе модели вряд ли применимы к такой ситуации. По нашему мнению, (б) выживает в различных ситуациях. Собственно теоретические трактаты в этой статье основаны на этой модели.
Следует отметить, что важную информацию, касающуюся функции преобразователя, можно получить при измерении эффектов Холла. Общепринято, что проводимость 𝜎 для полупроводника n-типа определяется плотностью [𝑒] и подвижностью 𝜇 носителей заряда (электронов) следующим образом: [𝑒] 𝜎 = −𝑞𝜇. (1) Здесь 𝑞 — электрический заряд протона. Значения [𝑒] и 𝜇 можно оценить независимо от измерения эффектов Холла. Измерения на полупроводниковых газовых сенсорных устройствах проводились японскими специалистами [29, 30].Согласно их результатам, и [𝑒] изменялись параллельно друг другу с увеличением концентрации восстановительных газов, в то время как 𝜇 оставалось почти постоянным, как измерено для устройств с напыленным SnO 2 толстопленочных. Это означает, что изменение [𝑒] отвечает исключительно за изменение 𝜎, таким образом поддерживая модель туннельного транспорта (b) на Рисунке 10. Сообщается об исключительном случае с устройством SnO 2 , изготовленным из металлического олова с помощью метод испарения и окисления [29].В этом случае и [𝑒], и 𝜇 увеличиваются с увеличением концентрации целевого газа (этанола), что приводит к повышенной чувствительности по сравнению с распыляемыми устройствами. Это различие в поведении, вероятно, связано с изменением морфологии составляющих кристаллов. Авторы объяснили такую газовую чувствительность как результат очень маленьких кристаллов на основе модели шейки, подобной той, которая показана как (c) на рисунке 10, но кажется трудным объяснить газовую чувствительность [𝑒] на основе этой модели.Модель туннельного переноса, с другой стороны, по-видимому, лучше объясняет чувствительность как [], и 𝜇, при условии, что допущена дисперсия в размере кристалла, хотя это еще предстоит сделать.
2.5. Сенсибилизация посторонними веществами
Как упоминалось в разделе 1, реальные сенсорные устройства почти всегда загружены небольшими количествами посторонних веществ, так называемых сенсибилизаторов. Типы используемых или подтвержденных сенсибилизаторов весьма разнообразны, включая благородные металлы (Pt и Au), оксиды благородных металлов (PdO, Ag 2 O, Rh 2 O 3 и т. Д.), оксиды неблагородных металлов (Fe 2 O 3 , Co 3 O 4 и т. д.), оксиды щелочных или редкоземельных металлов (CaO, La 2 O 3 и т. д.), и оксид щелочного металла (Rb 2 O). Чтобы сенсибилизация действовала, сенсибилизаторы должны быть хорошо распределены на кристаллах, составляющих сенсорные устройства. Как показано на Рисунке 11 [31], сенсибилизаторы обычно откладываются в виде мелких частиц, хорошо прилипающих к лежащим ниже кристаллам. Однако роль сенсибилизаторов (механизмов сенсибилизации) не всегда ясна.Помимо сенсибилизации за счет изменения кислотно-основных свойств поверхности кристаллов, что жизненно важно в реакциях, катализируемых кислотно-щелочными катализаторами, таких как окисление спиртов, мы предложили два типа механизмов сенсибилизации, то есть химическую сенсибилизацию и электронную сенсибилизацию, действующих для восстановительные газы [32]. Химическая сенсибилизация вызвана каталитическим действием сенсибилизаторов, таких как Pt. Когда целевой газ устойчив к окислению, как, например, метан, он активируется (или превращается) в более реакционноспособные промежуточные соединения, такие как альдегиды, перед тем, как попасть на поверхность кристалла.Электронная сенсибилизация возникает, когда посторонние вещества вытягивают электроны из кристаллов, что легко увидеть по увеличению сопротивления устройства. Многие из известных сенсибилизаторов представляют собой оксиды p-типа, поэтому образование p-n-переходов между крошечными отложениями сенсибилизаторов и лежащим в их основе SnO 2 (n-тип) не кажется таким маловероятным. Было показано, что работа выхода SnO 2 значительно увеличивается при загрузке PdO (около 0,1 эВ), Ag 2 O (0.3 эВ) и CuO (0,5 эВ), как измерено с помощью XPS [33]. Здесь цифры в скобках представляют собой приращения работы выхода в соответствующих случаях. В этих случаях каждый сенсибилизатор может подвергаться окислительно-восстановительному изменению, и, когда оно снижается целевыми газами, было подтверждено, что работа выхода и сопротивление устройства возвращаются к исходным значениям. Таким образом, был сделан вывод, что сочетание образования p-n-переходов и окислительно-восстановительных изменений приводит к сенсибилизации. Этот механизм, однако, сталкивается с трудностями при учете сенсибилизации, оказываемой другими сенсибилизаторами, такими как Au, Fe 2 O 3 , Co 3 O 4 и Rb 2 O, которые увеличивают работу выхода SnO 2 более или менее, но менее легко или полностью устойчивы к окислительно-восстановительным изменениям.Похоже, что существуют разные механизмы электронной сенсибилизации, которые охватывают случаи без редокс-изменений. Теоретические подходы к этому вопросу заслуживают применения.
3. Теоретический подход к чувствительности сенсора к кислороду
В течение долгого времени механизм обнаружения газа был одной из наиболее интересных тем в полупроводниковых газовых сенсорах. Однако, несмотря на все предпринятые до сих пор усилия, лишь немногим удалось раскрыть его с фундаментальной точки зрения.Как хорошо известно, хемосорбции и катализу молекул газа на полупроводниковых поверхностях уделялось много внимания еще до появления полупроводниковых газовых сенсоров. Для объяснения хемосорбции и катализа на полупроводниках была предложена электронная теория [34–36]. Это хорошо объясняет, как перенос электронов между адсобатами и полупроводником приводит к образованию слоя обеднения, накопления или инверсии на поверхности полупроводников. Применительно к полупроводниковым газовым сенсорам он оказался полезным для качественного понимания их поведения.К сожалению, количественного понимания этого нет. Для этого есть несколько причин, и наиболее серьезная, на наш взгляд, заключается в том, что теория не может правильно работать с такими маленькими кристаллами полупроводника, которые используются в газовых сенсорах. Легко понять, что реакция на кислород является исходной базой для полупроводниковых газовых сенсоров. Датчики активны в воздухе, обнаруживая доступ целевых газов. В начале этого раздела эта теория применяется к реакции на кислород, чтобы продемонстрировать, что получается.Затем вводится новая теория для малых кристаллов, без которой невозможно понять поведение полупроводниковых газовых сенсоров. В следующих случаях рассматриваемые полупроводниковые кристаллы имеют форму пластины, если не указано иное, поскольку математические выражения для других форм, сферы и столбца, становятся гораздо более сложными и утомительными из-за эффекта формы.
3.1. Традиционная теория истощения (большие кристаллы)
Истощение больших полупроводниковых кристаллов можно рассматривать с помощью традиционной теории.Рассмотрим адсорбцию электроноакцепторных молекул (обычно O 2 ) на поверхности большого полупроводникового кристалла n-типа. Эта ситуация хорошо аппроксимируется адсорбцией на плоскости большого кристалла, разделенного пополам, как это схематично показано на рисунке 12 [37]. В результате переноса электронов в приповерхностной области образуется обедненный слой, толщина которого увеличивается с увеличением переноса электронов. Перенос электрона достигает равновесия, когда уровень Ферми на адсорбированной частице совпадает с уровнем Ферми в объеме полупроводника.
Электростатическое равновесие внутри кристалла в таком случае можно рассматривать количественно при упрощающих предположениях. Традиционно предполагается, что (1) доноры полностью ионизированы, (2) нет других электронных ловушек, кроме адсорбатов, и (3) все электроны проводимости на глубину w полностью переносятся на поверхность (резкая модель ). Поскольку доноры в SnO 2 , как сообщается, присутствуют на мелких уровнях (0,05–0,15 эВ) ниже края зоны проводимости [38], первое предположение может быть достаточно приемлемым.Второй может лучше подходить для ионного полупроводника, такого как SnO 2 , чем для неионогенного полупроводника, такого как кремний. Третий, хотя и полезен для упрощения математических трактовок, не всегда может быть рационализирован, как упомянуто ниже. Однако здесь всегда используется резкая модель, если не указано иное.
При этих предположениях плотность поверхностных зарядов, SC, номинально равна −, где
.