служебное, экстренное и аварийное торможение прерывистым и ступенчатым способом
Правильное торможение — один из основных факторов, обеспечивающих безаварийную езду на автомобиле. Торможение способствует исправлению ошибок в определении скорости, дистанции, дорожно-транспортной ситуации, но трудности связанные с торможении часто могут стать и причиной дорожно-транспортного происшествия с тяжелыми последствиями. Выполняя маневр торможения для обеспечения безопасности движения, будьте аккуратны, ведь любая ошибка водителя может спровоцировать снос, занос, вращение и опрокидывание транспортного средства.
Для правильного торможения нужно:
- использовать максимальное сцепление колес с покрытием дороги,
- использовать торможение двигателем,
- уметь сбросить скорость при отказе тормозов,
- сохранить прямолинейное направление движения
Транспортное средство теряет скорость под действием силы трения, образуемой между поверхностью покрытия и рабочей поверхностью шины.
Максимальное торможение зависит не от того, как сильно нажимать на педаль тормоза, а от того, какая нагрузка приходится на колесо, и какое сцепление у колеса с дорогой. Чем больше сцепление с дорогой и нагрузка на колесо, тем быстрее произойдет торможение.
Существует три способа торможения:
- служебное торможение — обычное торможение применяемое повседневно,
- экстренное торможение — применяется в ситуациях, связанных с отсутствием времени и расстояния для выполнения обычного торможения,
- аварийное торможение — используется при отказе тормозного механизма автомобиля.
Экстренное торможение можно провести двумя способами — прерывистым и ступенчатым.
Прерывистое торможение: при данном виде торможения нужно чередовать нажатие и полное отпускание педали тормоза. Причина, по которой нужно прекращать работу тормозных механизмов — блокировка колес.
Данный способ нужно применять на дорогах с разными участками покрытия. Например, асфальт и грязь, снег, лед. Отпускать тормоз нужно перед наездом на участок с более скользким покрытием. Эффективность данного способа не всегда достаточна, так как прерывистая работа тормозных механизмов увеличивает длину тормозного пути.
Ступенчатый способ торможения: данный способ отличается от прерывистого тем, что не имеет фазы прекращения тормозного воздействия. Для выполнения такого торможения необходимо ступенчато увеличивать давление на педаль тормоза и время приложения. Первое воздействие на педаль должно быть коротким и не сильным.
аварийное торможение — это… Что такое аварийное торможение?
- аварийное торможение
-
– осуществляется при выходе из строя рабочей тормозной системы – при этом используется стояночный тормоз или скольжение колеса или кузова по препятствию сбоку (поребрик, стена, забор и т.
 д.).
д.).
 д.).
д.).EdwART. Словарь автомобильного жаргона, 2009
- аварийное выключение режима охраны
- аварийный автомобиль
Смотреть что такое «аварийное торможение» в других словарях:
аварийное торможение — авто осуществляется при выходе из строя рабочей тормозной системы, при этом используется стояночный тормоз или скольжение колеса или кузова по препятствию сбоку (поребрик, стена, забор и т.д.) … Универсальный дополнительный практический толковый словарь И. Мостицкого
Автоматическое (аварийное) торможение прицепа (полуприцепа) автомобиля — автоматическое (аварийное) торможение торможение прицепа, выполняемое тормозной системой без управляющего воздействия водителя при разрыве тормозных магистралей тормозного привода;.
.. Источник: Постановление Правительства РФ от 10.09.2009 N 720… … Официальная терминологияавтоматическое торможение — Торможение прицепа или прицепов, осуществляемое автоматически в случае разъединения транспортных средств, образующих комбинацию, включая разрыв сцепного устройства, при этом эффективность торможения остальных транспортных средств, входивших в… … Справочник технического переводчика
Реверсивное торможение — Реверсивное торможение вид торможения, при котором тормозной момент создаётся за счёт изменения направления тяги двигателя на противоположный движению. По сравнению с другими видами торможения, реверсивное позволяет сохранить высокую… … Википедия
Характеристики — К.4. Характеристики Применяют следующие дополнительные характеристики: К.4.3.1.2. Номинальное напряжение изоляции Минимальное значение номинального напряжения изоляции должно быть 250 В. К.4.3.2.1. Условный тепловой ток на открытом воздухе… … Словарь-справочник терминов нормативно-технической документации
Характеристики тормозных устройств — 5.
2. Характеристики тормозных устройств 5.2.1. Все тормозные системы, которыми оборудовано транспортное средство, должны отвечать требованиям, предъявляемым к системам рабочего, аварийного и стояночного торможения. 5.2.2. Системы, обеспечивающие… … Словарь-справочник терминов нормативно-технической документацииГОСТ Р 41.13-H-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 H 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1 антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения автоматически … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 41.13-Н-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 Н 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.
1. антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения… … Словарь-справочник терминов нормативно-технической документацииУскорение — У этого термина существуют и другие значения, см. Ускорение (значения). Ускорение Размерность LT−2 Единицы измерения СИ … Википедия
МиГ-27 — ВВС Индии, 2011 год. Тип ис … Википедия
 .. Источник: Постановление Правительства РФ от 10.09.2009 N 720… … Официальная терминология
.. Источник: Постановление Правительства РФ от 10.09.2009 N 720… … Официальная терминология 2. Характеристики тормозных устройств 5.2.1. Все тормозные системы, которыми оборудовано транспортное средство, должны отвечать требованиям, предъявляемым к системам рабочего, аварийного и стояночного торможения. 5.2.2. Системы, обеспечивающие… … Словарь-справочник терминов нормативно-технической документации
2. Характеристики тормозных устройств 5.2.1. Все тормозные системы, которыми оборудовано транспортное средство, должны отвечать требованиям, предъявляемым к системам рабочего, аварийного и стояночного торможения. 5.2.2. Системы, обеспечивающие… … Словарь-справочник терминов нормативно-технической документации
Аварийное торможение вращением
Ситуация, являющаяся крайне редкой, но, тем не менее, остро-критичной, возникает при полном отказе тормозной системы. Современные автомобили оснащены тормозной двухконтурной системой, которая практически наверняка исключает полный отказ тормозов. Но ничего невозможного нет, поэтому если такая проблема возникла, то крайне тяжелых последствий не избежать. Торможение вращением — один из способов аварийного и экстренного снижения скорости. О нем и пойдет речь в нашем продолжении выпуска «Маневрирование».
Аварии, вызванные полным отказом пневматических тормозных устройств, унесли немало человеческих жизней. Связано это с тем, что пневматические тормозные системы не имеют давления воздуха в тормозном устройстве. Старые легковые автомобили, возраст которых превышает 20 лет, зачастую сталкиваются с проблемой, когда происходит разрыв тормозного шланга или дефект тормозного цилиндра колес, кроме того, водитель может просто напросто забыть проверить уровень в бачке тормозной жидкости и тогда также может наступить критическая ситуация.
Стресс — опасный признак
Специалисты утверждают, что определить зараннее отказ тормозной системы можно по ряду признаков, например, возникновение заносов, увод машины во время торможения или ослабления эффекта тормозов. При возникновении такой ситуации появление стресса и шока — неизбежно, так как обычно ситуация пугает своей неожиданностью и остротой момента. Водители, имеющий богатый опыт вождения, среагируют на опасность мгновенно, и многократно будут повторять импульсное нажатие на тормоз, что позволит увеличить давление в тормозах и снизить скорость без нештатных последствий.
Новичок же продолжит изо всех сил давить на педаль тормоза, не отпуская его; результата такие действия не дадут, что вызовет у водителя шоковое состояние, вплоть до остолбенения.
Случается, что удача на стороне водителя и снизить скорость машины можно не особо эффективными способами, например, тормозить двигателем, включив более низкую передачу или стояночным тормозом. Но все же чаще нужно действовать нестандартно для того, чтобы избежать аварии.
Торможение вращением
Такой подход может быть проведен двумя способами — торможением боковым соскальзыванием, о котором мы говорили раньше и торможением с использованием вращения автомобиля. Способ торможения вращением автомобиля считается очень эффективным, так как, используя его, сокращается остановочный путь.
Для того чтобы осуществить прием нужно переводить поступательные движения во вращательные и снижать скорость, используя быстрое боковое скольжение колес задней оси.
Получается, что задние колеса, тормозя, оставляют спиралевидный тормозной путь, что объясняет хорошую тормозную динамику.
Как выполнить вращение?
Торможение вращением подразумевает три последовательных действия. Для начала нужно спровоцировать стартовый импульс вращения, используя при этом включение-выключение стояночного тормоза, при въезде в дугу поворота, импульсное включение более низкой передачи (дроссель при этом должен быть закрыт), контрсмещение или контрзанос.
Далее необходимо дросселированием вызвать пробуксовку и скольжение задних колес, что приведет к интенсивному вращению передних колес вокруг оси. Чтобы получить необходимый результат нужно вывернуть колеса на наиболее возможный угол, а после резко довести до максимума частоту вращательных оборотов коленчатого вала двигателя. Удерживать этот процесс нужно пока автомобиль не развернет на 180 градусов.
Может возникнуть ситуация, когда не получилось полностью завершить остановку, тогда стоит многократно применить вышеописанные действия, пока автомобиль полностью не встанет.
Тормозим всем чем можно
Когда педаль тормоза ушла в пол, а торможение не происходит, не впадайте в панику. Оживить тормозную систему помогут один-два импульсных нажатия, но полностью надеяться на их спасательное действие не стоит, не обнадеживайтесь и пытайтесь тормозить всеми доступными способами — ручником, резким включением ниprих передач, боковым соскальзыванием. После того, как все известные вам способы торможения не достигли должного результата — применяйте вращение, учитывая, что этот прием не вызовет авариной ситуации для других участников дорожного движения.
Посмотрим, как выглядит вращение на практическом примере:
Пример не самый удачный, вращение вышло не из-за отказа тормозов, но сам факт сокращения скорости налицо. За короткое расстояние она снизилась до минимума, так что удар об снег был не так силен, чтобы повредить машину и водителя.
Важно, что если вы никогда ранее не пробовали данный способ торможения, то даже не пытайтесь его выполнить в критической ситуации, результат может быть хуже, чем, если бы вы не пытались его использовать для избежания аварии. Связано это с тем, что, во-первых нужно делать сразу несколько операций высокой технической сноровки, а во-вторых, если не соблюсти все вышеуказанные пункты приема, автомобиль теряет устойчивость, переходит в неуправляемое скольжение боком и может опрокинуться.
Чтобы все делать правильно и наработать опыт, необходимо обращаться на курсы контраварийного вождения. Где-где, а там вас научат выходить из самых сложных и непредвиденных ситуаций.
Удачи вам и безаварийной езды.
В статье использовано изображение с сайта www.autocentre.uaЭкстренное торможение на мотоцикле
Кто-то скажет, мол при езде в городе любое торможение можно назвать экстренным, ведь не будешь же ты тормозить без видимой на то острой причины, городской трафик достаточно плотный. Так вот, экстренное торможение от любого другого отличает количество времени, за которое необходимо сбросить скорость до нужной, а его у вас для этого до неприличия мало.
Так вот, экстренное торможение от любого другого отличает количество времени, за которое необходимо сбросить скорость до нужной, а его у вас для этого до неприличия мало.
Страх не успеть оттормозиться приводит к панике, а та неминуемо тащит за собой роковые ошибки. Рассмотрим основные моменты.
Положение мотоцикла и рулевого колеса
При экстренном торможении запомните главнейшую аксиому, которая неоспорима: если вы совершаете маневр, то тормоза должны быть отпущены, а если тормозите, то не подруливаете.
Поясню. При зажатом рычаге тормоза колесо и без того озадачено блокировкой во время движения, а когда вы еще собираетесь его повернуть, то на мотоцикле происходит или срыв колеса, или воблинг. Любые маневры с зажатым тормозам только увеличивают опасность падения и при этом уменьшают эффективность самого торможения.
Говоря о положении мотоцикла очень важно, чтобы он находился в ровном вертикальном состоянии. Чтобы тормоза сработали на «ура» и производителю не было бы стыдно перед вашими родными за то, что ваш тормозной путь оказался длиннее — не мешайте им делать свою работу. При любом наклоне мотоцикла или маневре телом, рулем вы так или иначе изменяете пятно контакта покрышки с поверхностью дороги. А теперь представьте, вы поставили шикарнейшие тормоза на свой суперспорт, заложили в городе под коленочку (что в принципе идея не фонтан), как тут на перекрестке вылетает машина, а вы уже в повороте. Так как вы в маневре, пятно контакта смещается на покрышке к краю, сцепление естественно меньше. Вы выжимаете тормоза, да, колесо блокируется, но скорость и угол наклона не дает колесу полного сцепления. В первом случае, вы просто не успеете остановиться, во втором случае, торможение в повороте приведет к срыву колеса и падению.
При любом наклоне мотоцикла или маневре телом, рулем вы так или иначе изменяете пятно контакта покрышки с поверхностью дороги. А теперь представьте, вы поставили шикарнейшие тормоза на свой суперспорт, заложили в городе под коленочку (что в принципе идея не фонтан), как тут на перекрестке вылетает машина, а вы уже в повороте. Так как вы в маневре, пятно контакта смещается на покрышке к краю, сцепление естественно меньше. Вы выжимаете тормоза, да, колесо блокируется, но скорость и угол наклона не дает колесу полного сцепления. В первом случае, вы просто не успеете остановиться, во втором случае, торможение в повороте приведет к срыву колеса и падению.
Срыв колеса
Относительно срыва колеса долго рассуждать не приходится. В целом срыв колеса является побочным эффектом торможения в повороте. По сути это же явление реально назвать «снос», просто снос не всегда вызывается действием тормоза. Срыв в экстренном торможении происходит так резко, что вы чувствуете, будто у вас реально оторвало колесо. Когда вы только входите в поворот, срывает чаще переднее колесо, так как его угол наклона не соответствует вектору движения всего мотоцикла. А вот при выходе из поворота страдает заднее, так как большая часть мотоцикла уже практически вышла из маневра, а заднее колесо не успело перестроиться следом.
Когда вы только входите в поворот, срывает чаще переднее колесо, так как его угол наклона не соответствует вектору движения всего мотоцикла. А вот при выходе из поворота страдает заднее, так как большая часть мотоцикла уже практически вышла из маневра, а заднее колесо не успело перестроиться следом.
Экстренное торможение очень опасно в поворотах, потому что вам приходится или маневрировать, или тормозить. А когда вы нарушаете это правило и зажимаете тормоз, но пытаетесь управлять, колесо блокируется или резко заворачивается в бок рулевая ось, сцепление покрышки сводится к нулю и вы просто кубарем летите по трассе.
Работа тормозом
При экстренном торможении работать только одним тормозом — не разумно, нужно комбинировать. Дело в том, что если вы резко затормозите только передним тормозом, то перегрузите вилку и если не перелетите через руль на первых трех секундах, то в стоппи уйдете точно. Если вы экстренно затормозите только задним тормозом, то его блокировка приведет или к юзу колеса, или к меньшей эффективности торможения в целом.
Вывод — использовать оба тормоза.
Подведем итоги
Действия во время экстренного торможения:
- Выровнять мотоцикл и колесную базу
- Не маневрировать во время торможения
- Использовать оба тормоза
- Не паниковать
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Тормозное управление
Системы управления тормозами
Антиблокировочная система (ABS)
Если рассматривать ESC как систему более высокого уровня, «центральную систему», то антиблокировочная система ABS является первоисточником, из которого развились все остальные системы контроля сцепления с дорогой. Первые электронные системы ABS были представлены в 1969 году.
Принцип работы системы ABS заключается в ограничении давления в тормозной системе настолько, чтобы через пятно контакта всё ещё могли передаваться боковые направляющие усилия.
При экстренном
торможении одно из колёс (или несколько колёс) будут начинать блокироваться
раньше, чем остальные, поскольку трение между шиной и дорожным покрытием
зависит от множества причин и постоянно изменяется. При блокировании одного из
колёс говорят также о 100% проскальзывании. При этом заблокированное колесо
скользит по дорожному покрытию, примерно как ластик при стирании скользит по
поверхности бумаги. С исчезновением между шиной и дорогой трения сцепления
(трения покоя) колёса теряют возможность передавать боковые усилия,
удерживающие автомобиль на курсе его движения. Автомобиль теряет управляемость,
и малейшее случайное боковое усилие приводит к его заносу (рис.5.2.27).
При блокировании одного из
колёс говорят также о 100% проскальзывании. При этом заблокированное колесо
скользит по дорожному покрытию, примерно как ластик при стирании скользит по
поверхности бумаги. С исчезновением между шиной и дорогой трения сцепления
(трения покоя) колёса теряют возможность передавать боковые усилия,
удерживающие автомобиль на курсе его движения. Автомобиль теряет управляемость,
и малейшее случайное боковое усилие приводит к его заносу (рис.5.2.27).
Рисунок 5.2.27 – Экстренное торможение автомобиля без ABS
Только появление
первых практически применимых систем ABS дало возможность эффективно
предотвращать такое развитие опасных ситуаций. ABS повышает курсовую
устойчивость автомобиля тем, что не допускает блокировки колёс. Она уменьшает
давление в тормозах соответствующих колёс до тех пор, пока между шиной и
покрытием не восстановится трение покоя, при котором возможна передача
максимального тормозящего усилия. При этом восстанавливается возможность колеса
воспринимать боковые усилия, т. е. сохраняется управляемость автомобиля (рис.5.2.28).
е. сохраняется управляемость автомобиля (рис.5.2.28).
Рисунок 5.2.28 – Экстренное торможение автомобиля с ABS
Поскольку свойства дорожного покрытия в пределах тормозного пути могут меняться, система должна быть в состоянии не только удерживать заданное давление, но и при необходимости довольно быстро уменьшать или увеличивать его (см. пример далее, рис.5.2.29).
Рисунок 5.2.29 – График изменения давления в тормозной системе в зависимости от коэффициента сцепления колес с дорогой
Водитель
начинает торможение на мокром дорожном покрытии (отрезок 1). Заданное им
тормозное давление (степень нажатия педали тормоза) привело бы в этих условиях
к блокированию колёс. ABS ограничивает тормозное давление до необходимого значения
и поддерживает его на этом уровне, пока свойства дорожного покрытия не
изменятся (отрезок 2). Затем мокрый участок дороги сменяется сухим, в
результате чего тормозное давление снова можно начать повышать (отрезок 3). После
увеличения значение давления снова ограничивается на новом, более высоком
уровне (отрезок 4). Когда колёса снова попадают на мокрый участок, давление
должно быть снижено до уровня, при котором они не будут блокироваться (отрезок
5).
После
увеличения значение давления снова ограничивается на новом, более высоком
уровне (отрезок 4). Когда колёса снова попадают на мокрый участок, давление
должно быть снижено до уровня, при котором они не будут блокироваться (отрезок
5).
Цель такого алгоритма регулирования — обеспечить минимальный тормозной путь, который возможен только при безусловном сохранении управляемости автомобиля.
На примере автомобиля Audi Q5 будут коротко описаны все основные компоненты системы, которые требуются для реализации функций различных систем, рассматриваемых далее.
Компоненты, необходимые для реализации самой функции ABS, выделены синим цветом (рис.5.2.30).
Рисунок 5.2.30 – Расположение компонентов ABS на автомобиле
Реализация необходимого тормозного давления осуществляется с помощью трёх следующих основных функций:
• поддержания тормозного давления постоянным на текущем уровне;
• уменьшения текущего тормозного давления;
•
увеличения текущего тормозного давления.
Для повышения безопасности автомобиля гидропривод тормозов выполняется двухконтурным. Неисправность одного из компонентов приводит к отказу только одного из контуров, автомобиль при этом может быть остановлен с помощью другого контура.
Тормозные механизмы можно разделить на контуры по осям (контур передних и контур задних колёс) или по диагонали (контур левого переднего/правого заднего колеса и контур правого переднего/левого заднего колеса). Как правило, применяется диагональная схема разделения контуров.
В гидравлическом блоке объединены все гидравлические компоненты, требующиеся для реализации функций увеличения давления, поддержания давления и уменьшения давления. Это, прежде всего, электромагнитные клапаны, а также насос обратной подачи с его электрическим приводом.
Помимо этого, в
гидравлическом блоке имеются аккумуляторы давления, различные внутренние каналы
и обратные клапаны. Для регистрации фактического тормозного давления внутри блока
устанавливается также как минимум один (больше в зависимости от комплектации)
датчик давления в тормозной системе.
Каждому тормозному цилиндру в пределах его контура соответствует один впускной и один выпускной клапан ABS. Тем самым тормозной механизм каждого колеса может управляться независимо от остальных.
Схема гидравлических контуров ABS представлена на рисунке 5.2.31.
Рисунок 5.2.31 – Схема гидравлических контуров ABS
В отличие от системы ESP, для включения системы ABS необходимо, чтобы водитель нажал на педаль тормоза. Система не приводится в действие самостоятельно.
При торможении (рис.5.2.32) блок управления ABS на основании частот вращения колес вычисляет скорость автомобиля. Затем он сравнивает частоты вращения отдельных колес со скоростью автомобиля и вычисляет значения тормозного проскальзывания.
Рисунок 5.2.32 – Работа ABS при нажатии педали тормоза водителем
При возникновении
опасности блокирования одного или нескольких колёс ABS предотвращает дальнейшее
увеличение давления в соответствующих тормозных цилиндрах.
Субъективно водитель воспринимает срабатывание ABS как лёгкое пульсирование педали тормоза. Эти пульсации возникают вследствие изменения давления в гидравлическом контуре при работе ABS. Автомобиль сохраняет управляемость, поскольку ABS предотвращает блокирование отдельных колёс. Отключить функцию ABS вручную нельзя.
Когда блок управления ABS распознаёт опасность блокирования одного из колёс, он отдаёт команду закрыть впускной клапан ABS этого колеса, оставляя при этом выпускной клапан ABS закрытым. Тем самым давление в соответствующем тормозном цилиндре удерживается на достигнутом уровне и не увеличивается при дальнейшем усилении нажатия на педаль тормоза (рис.5.2.33).
Рисунок 5.2.33 – Работа ABS в режиме удержания
Если колесо продолжает демонстрировать склонность к блокированию, блок управления открывает соответствующий выпускной клапан ABS, оставляя при этом впускной клапан закрытым (рис.5.2.34).
Рисунок 5. 2.34 – Работа ABS в режиме сброса давления
2.34 – Работа ABS в режиме сброса давления
Тормозная жидкость перетекает в аккумулятор давления, и давление в тормозном цилиндре падает. Тем самым вращение колеса может снова ускориться.
Если объём аккумулятора оказывается недостаточным для того, чтобы устранить склонность колеса к блокированию, блок управления ABS включает насос обратной подачи, который, преодолевая давление, созданное нажатием педали водителем, перекачивает тормозную жидкость в компенсационный бачок. При этом водитель ощущает пульсацию педали тормоза.
Как только угловая скорость колеса превышает определённое значение, блок управления закрывает выпускной клапан ABS и открывает впускной (рис.5.2.35). Насос обратной подачи при необходимости продолжает работать.
Рисунок 5.2.35 – Работа ABS в режиме увеличения давления
Как только вновь
будет достигнуто давление, при котором возникнет опасность блокирования колеса,
цикл «удержание давления» — «сброс давления» — «увеличение давления»
повторяется снова, и так до тех пор, пока торможение не будет завершено, или
пока сравнение угловых скоростей колёс не покажет, что опасности блокирования
больше нет.
Эти функции включаются короткими импульсами, продолжительность которых измеряется в миллисекундах. На графике (рис.5.2.37) показан пример возможной последовательности таких импульсов.
Рисунок 5.2.37 – График работы системы ABS
Рассчитанное блоком управления ABS значение мгновенной скорости автомобиля предоставляется другим пользователям/системам автомобиля в виде выходного сигнала. Система ABS рассчитывает скорость автомобиля с высокой точностью, поэтому на основании этого сигнала отображается также скорость на спидометре в комбинации приборов.
В соответствующих случаях блок управления ABS передаёт в блок управления двигателя сигнал «плохой» дороги.
Блок
управления использует сигналы датчиков детонации для регистрации пропусков
воспламенения и вызванной этими пропусками неравномерной работы двигателя. На
плохих дорогах неравномерности в работе двигателя могут быть вызваны также
передачей импульсов (сил) с неровностей дорожного полотна на ведущие колеса. Блок управления ABS распознаёт участки дороги с плохим покрытием, анализируя сигналы
датчиков частоты вращения колёс, и передаёт эту информацию в блок управления
двигателя. Таким образом, блок управления двигателя «знает», что неравномерности
работы вызваны внешними факторами, и не предпринимает попыток отрегулировать
работу двигателя для их устранения.
Блок управления ABS распознаёт участки дороги с плохим покрытием, анализируя сигналы
датчиков частоты вращения колёс, и передаёт эту информацию в блок управления
двигателя. Таким образом, блок управления двигателя «знает», что неравномерности
работы вызваны внешними факторами, и не предпринимает попыток отрегулировать
работу двигателя для их устранения.
Техника правильного торможения на мотоцикле
Каким колесом тормозить?
Примерно 70% тормозного усилия нужно прикладывать на переднее колесо и 30% — на заднее. Это объясняется тем, что при торможении центр тяжести переходит с одного колеса на другое. В этот момент заднее колесо легче блокировать, а вот переднее сложнее, отчего вы можете потерять контроль над мотоциклом. Поэтому тормозить стоит обоими тормозами. Снизить скорость также помогает переключение на понижающую передачу.
Дорожные, спортивные и другие мотоциклы с короткой базой и высоким центром тяжести лучше всего останавливаются передним колесом. А вот круизёры и чопперы имеют длинную базу и низкий центр тяжести. Это означает, что тормозить их лучше задним колесом, но это не отменяет ведущую роль переднего тормоза.
А вот круизёры и чопперы имеют длинную базу и низкий центр тяжести. Это означает, что тормозить их лучше задним колесом, но это не отменяет ведущую роль переднего тормоза.
Поскольку тормоза на каждом мотоцикле работают индивидуально, нужно испытать их на свободной площадке — проверить силу нажатия и комбинацию обоих тормозов. Вы можете убедиться, что если резко нажать на передний тормоз, заднее колесо может оторваться от земли, и вы можете кувыркнуться вперёд. Если резко нажать на задний тормоз, мотоцикл будет заносить.
Чтобы затормозить, подожмите заднее колесо, пока мотоцикл не даст лёгкую просадку. Плавно, но уверенно зажмите рукоятку переднего тормоза. От того, насколько сильно вы нажмёте на ручку переднего тормоза, будет зависеть длина тормозного пути.
На что обратить внимание
- Закрывайте газ до того, как тормозить — это предотвратит падение.
- Нажимайте на рукоять переднего тормоза плавно, а затем постепенно увеличивайте усилие — это защитит от блокировки колеса и падения.
- Держите пальцы на тормозе — это позволит избежать паники и нажимать на рычаг плавно, а не резко.
- Не давите на руль — это усложняет работу тормоза и повышает риск «улететь» вперёд.
- Выпрямите руки, как будто отталкиваете руль — это усилит сопротивление инерции и сместит центр тяжести на заднее колесо, что, в свою очередь, повысит контролируемость мотоцикла.

Участники акции «Экстренное торможение», прошедшей в Абакане, признались, что получили неоценимый опыт — STOP-газета
Напомним, что сотрудники ГИБДД Хакасии пригласили жителей республиканской столицы на мастер-класс, организованный в рамках проведения всероссийской социальной кампании «Притормози», направленной на профилактику ДТП с участием пешеходов.
Важность проведения этого мероприятия в Хакасии велика. К примеру, только за три месяца текущего года в республике произошло 19 автопроисшествий с участием пешеходов в зоне действия пешеходных переходов. Рост этого показателя аварийности составил свыше пятидесяти процентов.
По вине водителей, которые не смогли затормозить перед «зеброй» травмы различной тяжести в этом году получили более двадцати человек. Лидирующее число пострадавших зарегистрировано в Абакане.
О том, как тормозить правильно, чтобы остановиться перед пешеходом, а не на нем, рассказали инструкторы автошколы «Попутчик», они же и показали, как нужно тормозить экстренно.
Иногда поведение пешеходов не поддается логическому объяснению, речь идет о тех людях, которые выходят на дорогу неожиданно в неустановленных для перехода местах. В этих случаях не каждый водитель способен к экстренному торможению, к тому же, не каждый знает, что это такое и как поведет себя в этой ситуации его автомобиль, хватит ли длины тормозного пути для полной остановки машины перед человеком.
Стать активными участниками тренинг-программы пожелали более тридцати водителей, обучающихся в автошколе, недавно ее закончивших и имеющих внушительный водительский стаж. На тренировочной площадке собрались мужчины и женщины разных возрастов, от 18 до 65 лет.
Проводить подобные эксперименты на дороге крайне опасно – в этом убедились все присутствующие. То и дело, прибегая к экстренному торможению, конус оказывался под передним бамперов авто. Не трудно догадаться, что может произойти, когда вместо фишки на дороге вдруг окажется человек.
Немного потренировавшись, участники акции приступили к выполнению упражнений, как говорится, «на оценку». Судьи фиксировали расстояние от переднего бампера до конуса. У каждого водителя было три попытки.
В заключении организаторы акции поздравили тех, кто сумел остановиться перед конусом, применив экстренное торможение, в считанных сантиметрах. Третье место досталось Руслану Масалову, его результат 46 см, На втором месте Виталий Алексеев – 35 см. Первое место у Валентины Адыгаевой. Она сумела остановить свой автомобиль в 27 сантиметрах от конуса.
— Я вожу автомобиль с 2006 года. К экстренному торможению никогда не прибегала. Спасибо за возможность почувствовать, что это такое. Слава Богу, у меня все получилось, я ни разу не сбила фишку. Но некоторым это было сделать нелегко. 40 км/ч, такова была скорость всех машин, участвующих в акции. Думаю, не каждый с такой скоростью передвигается по городу. Как выяснилось, даже ее достаточно, чтобы не успеть затормозить перед препятствием. Очень наглядный урок, — отметила победительница конкурса.
Но некоторым это было сделать нелегко. 40 км/ч, такова была скорость всех машин, участвующих в акции. Думаю, не каждый с такой скоростью передвигается по городу. Как выяснилось, даже ее достаточно, чтобы не успеть затормозить перед препятствием. Очень наглядный урок, — отметила победительница конкурса.
Каждый участник акции на собственном опыте убедился, что рассчитать тормозной путь практически невозможно. Следующий важный момент, который отметили для себя водители – чем меньше скорость, тем точнее остановка. И третий вывод заключается в том, что только штатное торможение позволяет остановиться в расчетной точке, при этом тормозить надо начинать значительно раньше.
УГИБДД МВД по Республике Хакасия
НаверхВозврат к списку
Как работает автоматическое экстренное торможение?
Система автоматического экстренного торможения (AEB) выпускается более 15 лет. Впервые он был предложен в автомобилях класса люкс, но теперь доступен в качестве стандартного оборудования на моделях начального уровня, таких же недорогих, как Toyota Yaris.
Обычно поставляется с предупреждением о прямом столкновении.
Автоматическое экстренное торможение также эффективно в сочетании с системой обнаружения пешеходов, когда какой-то дурак, переходящий улицу, обращает больше внимания на смартфон, чем на движение транспорта.Название этой технологии говорит само за себя. Тем не менее, вам может быть интересно, что это такое, что он делает и как работает.
Что такое автоматическое экстренное торможение?Автоматическое экстренное торможение предназначено для остановки или замедления транспортного средства до того, как оно столкнется с объектом на своем пути. Когда датчики или камеры обнаруживают впереди идущий объект, определяют, что транспортное средство приближается к нему со слишком высокой скоростью, и устанавливают, что водитель не предпринимает никаких действий, чтобы замедлить или остановить транспортное средство, они автоматически активируют тормоза.
Некоторые системы работают только на более низких скоростях, что помогает предотвратить изгибы крыльев в движении. Другие работают на более высоких скоростях, замедляя транспортное средство перед столкновением, чтобы уменьшить травмы и предотвратить смерть. Одни реагируют на пешеходов, велосипедистов и животных, другие — нет. Все чаще автоматическое торможение доступно и при движении задним ходом.
Другие работают на более высоких скоростях, замедляя транспортное средство перед столкновением, чтобы уменьшить травмы и предотвратить смерть. Одни реагируют на пешеходов, велосипедистов и животных, другие — нет. Все чаще автоматическое торможение доступно и при движении задним ходом.
В зависимости от конструкции системы для автоматического экстренного торможения используются камеры, радар или датчики.Когда эти технологии определяют объект на пути автомобиля и возможность столкновения с этим объектом, они автоматически активируют тормозную систему.
Эти системы не гарантируют, что вы избежите столкновения. Скорее всего, в обычных ситуациях они попытаются вовремя остановить ваш автомобиль. Как минимум, они замедляют ваш автомобиль, чтобы уменьшить силу удара.
Также важно помнить, что технология работает только тогда, когда камера, радар или датчики могут идентифицировать объекты впереди.Яркий солнечный свет, проливной дождь, наледи на снегу, темнота и другие переменные факторы влияют на автоматический аварийный режим.
Следовательно, это не замена внимательному вождению. Скорее, это подстраховка.
Подробнее: Автомобили KBB с рейтингом «Лучшая безопасность»
Ложные срабатывания автоматического экстренного торможенияИногда эта технология активируется, когда предполагаемые угрозы не являются реальными. В таких случаях резкое торможение обычно бывает кратковременным. Однако, когда это происходит, это может расшатать нервы водителя.
Иногда система ошибочно определяет транспортное средство на соседней полосе поворота как препятствие и запускает полное тормозное усилие. Пятнистый солнечный свет и отражения от знаков также могут на мгновение вызвать активацию. Эти ложные срабатывания обычно безвредны, но подчеркивают важность бдительности за рулем.
Хотя автоматическое экстренное торможение несовершенно, оно, тем не менее, является важным элементом безопасности.
Если вы подозреваете, что с вашей автоматической системой экстренного торможения что-то не так, посмотрите, сколько это будет стоить, используя наше Руководство по ценам на обслуживание и ремонт, и найдите ближайшие автомобильные мастерские, где можно выполнить работу.
10 автопроизводителей досрочно выполнили обязательство по автоматическому экстренному торможению
Десять автопроизводителей с опережением графика выполнили добровольное обязательство оборудовать почти все новые легковые автомобили автоматическим экстренным торможением.17 декабря 2020
Десять автопроизводителей выполнили добровольное обязательство оснастить почти все новые легковые автомобили, которые они производят для рынка США, автоматическим экстренным торможением (AEB), что значительно опережает целевой показатель на 2022–2023 годы.
Десять производителей применяют эту технологию в более чем 95 процентах автомобилей, произведенных в период с 1 сентября 2019 года по 31 августа 2020 года. Еще три автопроизводителя превысили 90-процентный порог. Однако пять из 20 автопроизводителей, подписавших это обязательство, оснастили AEB менее половины своих автомобилей.
Из 10 автопроизводителей, выполнивших обязательства досрочно, четыре — Audi, Mercedes-Benz, Volvo и Tesla — выполнили это в прошлом году, согласно отчетам производителей. В этом году к ним присоединились BMW, Hyundai, Mazda, Subaru, Toyota и Volkswagen.
В этом году к ним присоединились BMW, Hyundai, Mazda, Subaru, Toyota и Volkswagen.
Отчеты представляются ежегодно 20 производителями, которые обязались оснастить не менее 95 процентов своих легковых и грузовых автомобилей с полной массой 8 500 фунтов или меньше технологией предотвращения столкновений к производственному году, начинающемуся 1 сентября. 2022. В 2015 году это обязательство приняли Страховой институт безопасности дорожного движения и Национальное управление безопасности дорожного движения (НАБДД).
«Эти добровольные усилия позволяют быстро внедрить в автомобили важную технологию предотвращения аварий», — сказал президент IIHS Дэвид Харки. «Приятно видеть, что AEB стала основной функцией безопасности, которая теперь входит в стандартную комплектацию не только роскошных автомобилей и внедорожников, но и доступных моделей».
В дополнение к 10 производителям, которые уже выполнили обязательства AEB, еще три — Ford, Honda и Nissan — внедрили эту технологию в 9 из 10 автомобилей, выпущенных ими в прошлом году. В середине списка оказались два автопроизводителя: Kia за последний год оснастила 75 процентов своих автомобилей системой AEB, за ней следует Porsche с 55 процентами.
В середине списка оказались два автопроизводителя: Kia за последний год оснастила 75 процентов своих автомобилей системой AEB, за ней следует Porsche с 55 процентами.
В добровольном обязательстве не указаны этапы ввода в эксплуатацию, но Fiat Chrysler, General Motors, Jaguar Land Rover, Maserati и Mitsubishi должны наверстать упущенное, чтобы достичь цели 2022–23 годов для легких транспортных средств. В прошлом году они оснастили менее половины произведенных ими устройств системой AEB, которая соответствует требованиям добровольного обязательства.
«Многие автопроизводители проявили изобретательность и ловкость, сделав систему AEB для городских скоростей стандартом. NHTSA должно развить этот прогресс, обеспечив к 2025 году стандартную комплектацию всех новых транспортных средств более совершенными системами, которые также могут обнаруживать пешеходов и работать на скоростях шоссе », — сказал Дэвид Фридман, вице-президент по защите прав потребителей Consumer Reports. «Немногочисленные автопроизводители, которые сильно отстают от своих обязательств в отношении AEB, и особенно Fiat Chrysler, должны четко изложить, как они выйдут на рынок и превзойдут его. ”
”
Информация, собранная Consumer Reports, показывает, что все больше автопроизводителей делают стандартное оборудование городской скорости AEB на 100% своих моделей, гарантируя, что технология будет включена во все новые автомобили. Шесть автопроизводителей сделают это в 2021 модельном году по сравнению с двумя автопроизводителями в 2020 модельном году. Это увеличение свидетельствует о растущем понимании автопроизводителями того, что их клиенты ожидают, что AEB станет стандартом для любого нового автомобиля, который они могут купить.
Из всех компаний Ford зафиксировал одно из самых больших ежегодных улучшений в части автомобилей, оснащенных AEB, достигнув 91 процента в 2020 году по сравнению с 65 процентами в 2019 году и всего 6 процентами годом ранее.Ford также находится впереди всех на пути к следующему этапу выполнения своих обязательств — установке AEB на автомобили весом от 8 501 до 10 000 фунтов к 2025-26 годам. Ford оснастил 62% этих тяжелых автомобилей системой AEB.
Из четырех других автопроизводителей, которые сообщили о производстве автомобилей в этом диапазоне веса для рынка США за последний год, Fiat Chrysler был на 11%, а Nissan — на 9%. Mercedes-Benz и General Motors были на нуле.
В соответствии с условиями добровольного обязательства производители должны подтвердить, что система AEB на их транспортных средствах соответствует определенным стандартам производительности как для предупреждения о лобовом столкновении (FCW), так и для автоматического экстренного торможения.FCW должен соответствовать подмножеству текущих требований программы NHTSA по оценке безопасности 5 звезд в отношении сроков оповещения водителей. AEB должен получить, по крайней мере, высокий рейтинг в текущих тестах IIHS на предотвращение столкновений на треке. Базовыми показателями производительности для этих тестов являются снижение скорости не менее чем на 10 миль в час в тестах IIHS на 12 или 25 миль в час или снижение скорости на 5 миль в час в обоих тестах.
Ожидается, что добровольное обязательство предотвратит 42 000 аварий и 20 000 травм к 2025 году.Оценка основана на исследовании IIHS, которое показало, что системы предотвращения столкновения спереди с предупреждением о лобовом столкновении и с автоматическим экстренным торможением сокращают количество аварий с задней частью автомобиля вдвое.
| Процент автомобилей, произведенных с 1 сентября по 31 августа с использованием AEB, по данным производителя, для легковых автомобилей весом 8 500 фунтов или менее | Процент моделей 2021 года со стандартным AEB, согласно данным Consumer Reports | ||
|---|---|---|---|
| 2019 | 2020 | 2021 | |
| Тесла | 100 | 100 | 100 |
| Volvo | 100 | 100 | 100 |
| Audi | 99 | 99 | 83 |
| BMW | 84 | 99 | 94 |
| Субару | 84 | 99 | 57 1 |
| Volkswagen | 92 | 98 | 89 |
| Mercedes-Benz | 99 | 97 | 94 |
| Тойота / Лексус | 92 | 97 | 100 |
| Hyundai / Genesis | 78 | 96 | 93 |
| Мазда | 80 | 96 | 100 |
| Honda / Acura | 86 | 94 | 86 |
| Nissan / Инфинити | 86 | 93 | 82 2 |
| Форд / Линкольн | 65 | 91 | 83 |
| Киа | 59 | 75 | 50 2 |
| Порше | 38 | 55 | 50 |
| Мазерати | 69 | 48 | 33 |
| Дженерал Моторс | 29 | 47 | 50 |
| Митсубиси | 5 | 39 | 100 |
| Fiat Крайслер | 10 | 14 | 20 2 |
| Ягуар Ленд Ровер | 0 | 0 | 100 3 |
1 Пакет помощи водителю Subaru, который включает AEB, входит в стандартную комплектацию всех новых автомобилей с бесступенчатой трансмиссией (CVT), но не предлагается на автомобилях с механической коробкой передач. Три модели Subaru поставляются со стандартной механической коробкой передач и требуют доплаты за вариатор. По условиям добровольного обязательства автопроизводители могут отложить оснащение автомобилей с механической коробкой передач системой AEB до 2024-25 производственного года.
Три модели Subaru поставляются со стандартной механической коробкой передач и требуют доплаты за вариатор. По условиям добровольного обязательства автопроизводители могут отложить оснащение автомобилей с механической коробкой передач системой AEB до 2024-25 производственного года.
2 Процентная доля приходится на модели автопроизводителя 2021 года, спецификации которых известны по состоянию на 11 декабря 2020 года, но еще не на все модели 2021 года, предлагаемые автопроизводителем. В CR отсутствуют спецификации для двух моделей от Kia, одной от Nissan и всех моделей Fiat.
3 Jaguar Land Rover не сообщил, что его модели с AEB соответствуют требованиям к рабочим характеристикам, изложенным в добровольном обязательстве.
Модель автоматического экстренного торможения с учетом распознавания водителем намерения переднего транспортного средства
Намерение водителя передним транспортным средством играет важную роль в системе автоматического экстренного торможения (AEB). Если переднее транспортное средство резко затормозит, существует потенциальный риск столкновения со следующим автомобилем.Поэтому мы предлагаем модель распознавания намерений водителя для переднего транспортного средства, которая основана на нейронной сети обратного распространения (BP) и скрытой марковской модели (HMM). Данные о педали тормоза, педали акселератора и скорости транспортного средства используются в качестве входных данных предлагаемой модели BP-HMM для распознавания намерения водителя, которое включает равномерное вождение, нормальное торможение и экстренное торможение. Согласно признанному намерению водителя, переданному через Интернет транспортных средств, предлагается модель AEB для следующего транспортного средства, которая может динамически изменять критический тормозной путь в различных условиях движения, чтобы избежать наезда сзади.Чтобы проверить производительность предложенных моделей, мы провели тесты на распознавание намерений водителя и моделирование AEB в среде совместного моделирования Simulink и PreScan.
Если переднее транспортное средство резко затормозит, существует потенциальный риск столкновения со следующим автомобилем.Поэтому мы предлагаем модель распознавания намерений водителя для переднего транспортного средства, которая основана на нейронной сети обратного распространения (BP) и скрытой марковской модели (HMM). Данные о педали тормоза, педали акселератора и скорости транспортного средства используются в качестве входных данных предлагаемой модели BP-HMM для распознавания намерения водителя, которое включает равномерное вождение, нормальное торможение и экстренное торможение. Согласно признанному намерению водителя, переданному через Интернет транспортных средств, предлагается модель AEB для следующего транспортного средства, которая может динамически изменять критический тормозной путь в различных условиях движения, чтобы избежать наезда сзади.Чтобы проверить производительность предложенных моделей, мы провели тесты на распознавание намерений водителя и моделирование AEB в среде совместного моделирования Simulink и PreScan. Результаты моделирования показывают, что средняя точность распознавания предложенной модели BP-HMM составила 98%, что было лучше, чем у моделей BP и HMM. В тестах «От автомобиля к автомобилю сзади» (CCRm) и «От автомобиля к автомобилю сзади» (CCRb) минимальное относительное расстояние между следующим транспортным средством и передним транспортным средством находилось в диапазоне 1.5–2,7 м и 2,63–5,28 м соответственно. Предлагаемая модель AEB имеет лучшие характеристики предотвращения столкновений, чем традиционная модель AEB, и может адаптироваться к индивидуальным водителям.
Результаты моделирования показывают, что средняя точность распознавания предложенной модели BP-HMM составила 98%, что было лучше, чем у моделей BP и HMM. В тестах «От автомобиля к автомобилю сзади» (CCRm) и «От автомобиля к автомобилю сзади» (CCRb) минимальное относительное расстояние между следующим транспортным средством и передним транспортным средством находилось в диапазоне 1.5–2,7 м и 2,63–5,28 м соответственно. Предлагаемая модель AEB имеет лучшие характеристики предотвращения столкновений, чем традиционная модель AEB, и может адаптироваться к индивидуальным водителям.
1. Введение
Наезды сзади являются наиболее частыми дорожно-транспортными происшествиями, более 90% которых вызваны невнимательностью или нервозностью водителей [1]. Национальный совет по безопасности на транспорте (NTSB) указывает, что 80% наездов сзади можно избежать, используя передовые системы предотвращения столкновений [2].
Автоматическая система экстренного торможения (AEB) — это типичная усовершенствованная система предотвращения столкновений, в которой используются бортовые датчики для определения риска столкновения и при необходимости происходит автоматическое торможение во избежание столкновения. Согласно отчету об исследовании [3], когда скорость транспортного средства менее 50 км / ч, транспортные средства, использующие систему AEB, могут снизить количество аварий сзади на 38%. Поэтому изучение системы AEB имеет большое значение.
Согласно отчету об исследовании [3], когда скорость транспортного средства менее 50 км / ч, транспортные средства, использующие систему AEB, могут снизить количество аварий сзади на 38%. Поэтому изучение системы AEB имеет большое значение.
Это ключи системы AEB для оценки степени опасности и создания модели предотвращения столкновений.Во многих исследованиях для измерения риска используется безопасный тормозной путь [4–6] или время до столкновения (TTC) [7–9]. На основе этих моделей также есть много улучшений. Катаре и Эль-Шаркави [10] предложили модель предупреждения о столкновениях с использованием нейронной сети, основанной на контролируемом обучении, чтобы обеспечить раннее предупреждение о возможных столкновениях. Chen et al. [11] предложили новый алгоритм, учитывающий как время столкновения, так и безопасный тормозной путь. Kaempchen et al. В [12] предложен метод расчета времени срабатывания АЕБ при экстренном торможении, учитывающий все возможные траектории и размеры цели и машины-носителя. Pei et al. [13] предложил концепцию запаса по времени предотвращения столкновения на основе известной информации о движении мастерской, и был разработан иерархический алгоритм предупреждения / предупреждения столкновения, применимый к характеристикам предотвращения столкновения различных водителей. Кроме того, многие ученые также рассматривают влияние состояния дорожного покрытия на характеристики AEB. Han et al. [14] предложил стратегию торможения AEB, которая учитывала влияние различного трения на дороге на порог торможения TTC. Kim et al. [15] предложил алгоритм оценки максимального коэффициента трения шины о дорогу на основе взаимодействия нескольких моделей и применил его к системе AEB.Hwang и Choi [16] использовали торможение с ранним предупреждением для оценки максимального коэффициента трения шины в реальном времени, чтобы получить состояние сцепления с дорогой и спрогнозировать риск столкновения сзади, адаптивно на основе информации о трении. Kim et al. [17] предложил алгоритм управления AEB, который может компенсировать влияние уклона и трения дороги.
Pei et al. [13] предложил концепцию запаса по времени предотвращения столкновения на основе известной информации о движении мастерской, и был разработан иерархический алгоритм предупреждения / предупреждения столкновения, применимый к характеристикам предотвращения столкновения различных водителей. Кроме того, многие ученые также рассматривают влияние состояния дорожного покрытия на характеристики AEB. Han et al. [14] предложил стратегию торможения AEB, которая учитывала влияние различного трения на дороге на порог торможения TTC. Kim et al. [15] предложил алгоритм оценки максимального коэффициента трения шины о дорогу на основе взаимодействия нескольких моделей и применил его к системе AEB.Hwang и Choi [16] использовали торможение с ранним предупреждением для оценки максимального коэффициента трения шины в реальном времени, чтобы получить состояние сцепления с дорогой и спрогнозировать риск столкновения сзади, адаптивно на основе информации о трении. Kim et al. [17] предложил алгоритм управления AEB, который может компенсировать влияние уклона и трения дороги. Большинство параметров описанной выше модели исследования не могут быть скорректированы в режиме онлайн и не могут хорошо адаптироваться к поведению водителя в различных условиях движения.
Большинство параметров описанной выше модели исследования не могут быть скорректированы в режиме онлайн и не могут хорошо адаптироваться к поведению водителя в различных условиях движения.
В последнее время для повышения надежности системы исследованиям поведения драйверов уделяется больше внимания. Ли и др. [18] изучали поведение китайских водителей при визуальном сканировании на сигнальных и несигнальных перекрестках. Другое их исследование [19] показало, что заторы негативно влияют на поведение водителей на дороге после заторов, что служит ориентиром для разработки последующих систем помощи. Что касается модели антиколлизии, многие исследования начинают рассматривать адаптивную модель характеристик водителя.Xiong et al. [20] разработали онлайн-алгоритм классификации уровня риска, основанный на нескольких индексах безопасности, таких как TTC, временной интервал и относительное расстояние при экстренном торможении. Дуан и др. [21] извлекли три основных сценария конфликта между автомобилем и велосипедом из натуралистических данных о вождении, проанализировали влияние типов конфликтов на поведение китайских водителей при торможении и предложили метод разработки адаптивного Bicyclist-AEB, основанный на характеристиках торможения водителя. Wada et al. [22] описали режим замедления торможения профессиональных водителей в последнюю секунду с предполагаемым индексом риска и применили его к системе AEB.Wang et al. [23] предложили алгоритм предупреждения о прямом столкновении, который может регулировать порог предупреждения в реальном времени в соответствии с изменением поведения водителя. Белла и Руссо [24] проанализировали поведение водителя, определили эффективную систему помощи водителю, которая может быть легко принята водителем, а затем предложили новый алгоритм предупреждения о столкновении, основанный на восприятии риска водителем. Ли и др. [25] использовали алгоритм обучения искусственной нейронной сети для создания модели поведения водителя.Риск столкновения определялся в зависимости от ходовых качеств водителя. Wang et al. [26] использовали симулятор вождения для имитации событий, связанных только с торможением, а не столкновений, а затем использовали поведение водителя при торможении, чтобы имитировать ожидаемую реакцию водителя на замедление.
Wada et al. [22] описали режим замедления торможения профессиональных водителей в последнюю секунду с предполагаемым индексом риска и применили его к системе AEB.Wang et al. [23] предложили алгоритм предупреждения о прямом столкновении, который может регулировать порог предупреждения в реальном времени в соответствии с изменением поведения водителя. Белла и Руссо [24] проанализировали поведение водителя, определили эффективную систему помощи водителю, которая может быть легко принята водителем, а затем предложили новый алгоритм предупреждения о столкновении, основанный на восприятии риска водителем. Ли и др. [25] использовали алгоритм обучения искусственной нейронной сети для создания модели поведения водителя.Риск столкновения определялся в зависимости от ходовых качеств водителя. Wang et al. [26] использовали симулятор вождения для имитации событий, связанных только с торможением, а не столкновений, а затем использовали поведение водителя при торможении, чтобы имитировать ожидаемую реакцию водителя на замедление. Также существует множество исследований, в которых учитывается поведение или намерения других транспортных средств при вождении. Юань и др. [27] предложили метод прогнозирования маневра при смене полосы движения транспортных средств впереди с использованием скрытой марковской модели.Geng et al. [28] использовали HMM для изучения непрерывных характеристик поведения при вождении и предсказали поведение целевого транспортного средства, комбинируя апостериорную вероятность и априорную вероятность. Hu et al. [29] использовали семантику для определения поведения транспортного средства и вероятностную структуру, основанную на глубоких нейронных сетях, для оценки намерения водителя, конечного положения и соответствующей информации о времени окружающих транспортных средств. Jo et al. [30] предложили единый алгоритм отслеживания и обоснования поведения транспортных средств, который может одновременно оценивать динамику окружающих транспортных средств и намерения водителей.В этих исследованиях в основном используются датчики для получения состояния, которое показывает транспортное средство, они основываются на данных или моделях, чтобы адаптироваться к поведению водителя, и в меньшей степени учитывают поведение окружающих водителей транспортных средств и их меняющиеся тенденции, хотя это может быть как важны также характеристики водителя.
Также существует множество исследований, в которых учитывается поведение или намерения других транспортных средств при вождении. Юань и др. [27] предложили метод прогнозирования маневра при смене полосы движения транспортных средств впереди с использованием скрытой марковской модели.Geng et al. [28] использовали HMM для изучения непрерывных характеристик поведения при вождении и предсказали поведение целевого транспортного средства, комбинируя апостериорную вероятность и априорную вероятность. Hu et al. [29] использовали семантику для определения поведения транспортного средства и вероятностную структуру, основанную на глубоких нейронных сетях, для оценки намерения водителя, конечного положения и соответствующей информации о времени окружающих транспортных средств. Jo et al. [30] предложили единый алгоритм отслеживания и обоснования поведения транспортных средств, который может одновременно оценивать динамику окружающих транспортных средств и намерения водителей.В этих исследованиях в основном используются датчики для получения состояния, которое показывает транспортное средство, они основываются на данных или моделях, чтобы адаптироваться к поведению водителя, и в меньшей степени учитывают поведение окружающих водителей транспортных средств и их меняющиеся тенденции, хотя это может быть как важны также характеристики водителя.
С быстрым развитием коммуникационных технологий, применение технологии Интернета транспортных средств может упростить передачу данных между транспортными средствами [31–33].Wu et al. [34] предложили метод прогнозирования риска столкновения транспортного средства на основе Интернета транспортных средств, который может прогнозировать риск столкновения транспортного средства путем всестороннего учета движения / положения целевого транспортного средства, поведения водителя и дорожной информации. Thomas et al. [35] предложили систему предотвращения столкновений с использованием фильтра Калмана и специальной связи ближнего действия (DSRC) для пересечения прямых и кривых дорог. Лю и др. [36] предложили основанную на DSRC систему раннего предупреждения конфликтов в очереди, которая учитывала не только проницаемость DSRC, но и факторы влияния трафика и связи.Тиан и др. [37] предложили метод использования DSRC для прогнозирования поведения транспортного средства в среде совместного транспортного средства.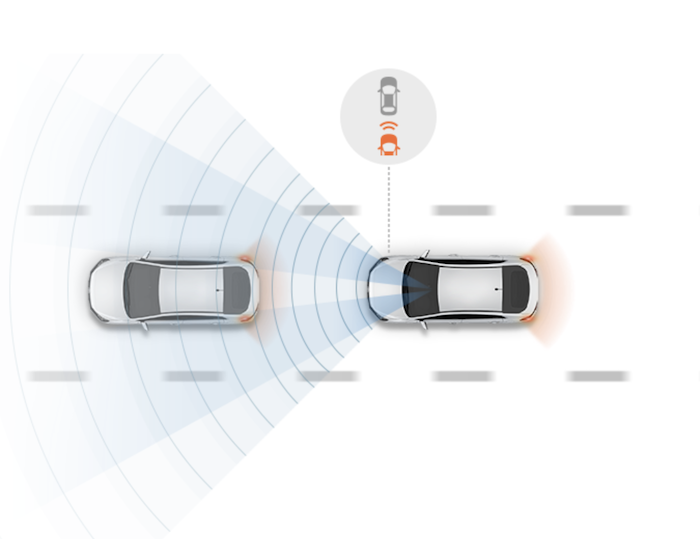 Вышеупомянутое исследование в основном применяется к системе раннего предупреждения и рассматривает только поведение переднего транспортного средства без учета времени, затрачиваемого на поведение водителя, прежде чем поведение транспортного средства изменится, что может привести к задержке прогнозирования. Однако вместо этого эти исследования предоставляют новые идеи для дизайна AEB.
Вышеупомянутое исследование в основном применяется к системе раннего предупреждения и рассматривает только поведение переднего транспортного средства без учета времени, затрачиваемого на поведение водителя, прежде чем поведение транспортного средства изменится, что может привести к задержке прогнозирования. Однако вместо этого эти исследования предоставляют новые идеи для дизайна AEB.
В этой статье мы предложили модель AEB, основанную на распознавании намерения водителя переднего транспортного средства.Модель распознает намерение движения переднего транспортного средства и передает информацию следующему транспортному средству с помощью технологии связи между автомобилями. По сравнению с предыдущими исследованиями, этот документ динамически добавляет намерение водителя переднего транспортного средства в систему AEB следующего транспортного средства посредством связи между транспортными средствами, чтобы улучшить характеристики системы предотвращения столкновений. Основным вкладом этого документа является следующее: (1) предлагается метод распознавания намерения вождения в реальном времени с двухуровневой структурой; (2) модель AEB предлагается на основе безопасного расстояния и намерения вождения переднего транспортного средства; (3) намерение вождения предшествующего транспортного средства динамически комбинируется с системой AEB следующего транспортного средства.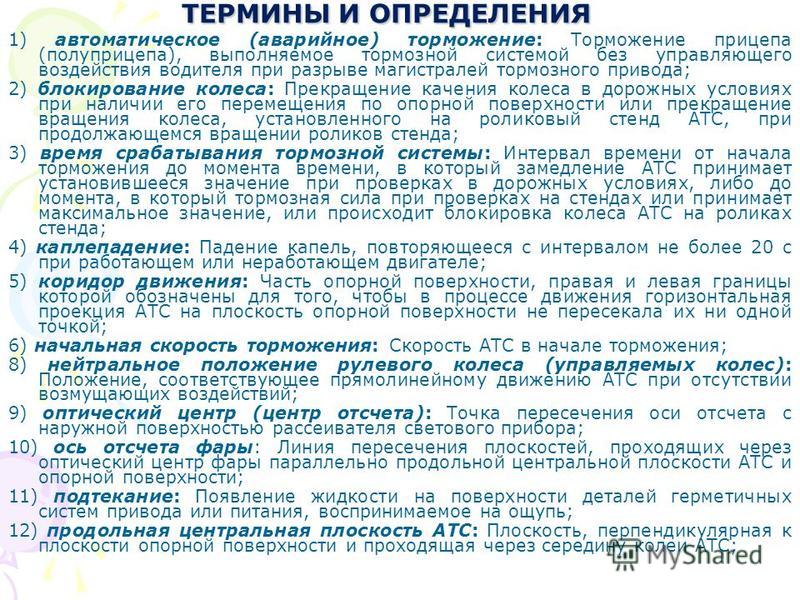
Остальная часть документа организована следующим образом: Раздел 2 представляет подробную методологию предлагаемого метода. В разделе 3 представлен имитационный эксперимент. В разделе 4 представлены экспериментальные результаты. Раздел 5 посвящен обсуждениям. Раздел 6 суммирует выводы.
2. Методы
Была предложена модель AEB, основанная на распознавании намерения водителя переднего транспортного средства через Интернет транспортных средств. Эта модель в основном состояла из двух частей: модели распознавания намерений водителя переднего автомобиля и модели AEB следующего автомобиля.На рисунке 1 представлена принципиальная схема работы системы. Во-первых, мы создали модель распознавания намерений водителя на основе BP-HMM для распознавания единообразного намерения вождения, нормального намерения при торможении и экстренного торможения водителя переднего транспортного средства по собранным данным о педали тормоза, педали акселератора и скорости движения. передний автомобиль. Во-вторых, распознанное намерение водителя и другие параметры движения переднего транспортного средства передавались следующему транспортному средству через Интернет транспортных средств.Наконец, в соответствии с полученным намерением водителя, в предлагаемой модели AEB следующего транспортного средства был изменен метод расчета критического тормозного пути и скорректирована логика торможения AEB в реальном времени.
Во-вторых, распознанное намерение водителя и другие параметры движения переднего транспортного средства передавались следующему транспортному средству через Интернет транспортных средств.Наконец, в соответствии с полученным намерением водителя, в предлагаемой модели AEB следующего транспортного средства был изменен метод расчета критического тормозного пути и скорректирована логика торможения AEB в реальном времени.
2.1. Модель распознавания намерений водителя переднего транспортного средства
Намерение водителя может быть отражено несколькими действиями водителя, происходящими одновременно или непрерывно в течение определенного периода. Рассматривая взаимосвязь между поведением и намерениями водителя, а также временными характеристиками поведения водителя, мы сначала распознали поведение водителя, а затем сделали вывод о намерении водителя по поведению распознанного водителя.
Модели BP и HMM — это модели двух типов, которые обычно используются для распознавания поведения и намерений водителей. Модель БП имеет простую структуру и высокую отказоустойчивость, но для ее обучения требуется большое количество образцов. Модель HMM обладает сильной способностью к временному моделированию, что требует дополнительной поддержки предварительных знаний во время обучения и подходит для небольших выборок. Поэтому мы предложили модель распознавания намерений водителя, основанную на BP и HMM, которая полностью использует классификационную способность нейронной сети BP для больших данных и способность HMM отображать временные отношения малых данных [38].
Модель БП имеет простую структуру и высокую отказоустойчивость, но для ее обучения требуется большое количество образцов. Модель HMM обладает сильной способностью к временному моделированию, что требует дополнительной поддержки предварительных знаний во время обучения и подходит для небольших выборок. Поэтому мы предложили модель распознавания намерений водителя, основанную на BP и HMM, которая полностью использует классификационную способность нейронной сети BP для больших данных и способность HMM отображать временные отношения малых данных [38].
Столкновения сзади в основном происходят, когда скорость переднего транспортного средства ниже, чем у следующего автомобиля, или когда переднее транспортное средство тормозит. Таким образом, предлагаемая модель BP-HMM в основном ориентирована на распознавание намерения водителя при равномерной скорости, нормальном торможении и экстренном торможении.
На рисунке 2 показана структура предлагаемой модели BP-HMM. Смещение педали и скорость педали тормоза и педали акселератора использовались в качестве входных данных модели BP для распознавания поведения водителя переднего транспортного средства. Мы разделили типичное поведение водителя при торможении на шесть категорий: легкое нажатие на педаль тормоза, нормальное нажатие на педаль тормоза, быстрое нажатие педали тормоза, удержание педали тормоза в нужном положении, отпускание педали тормоза и отсутствие действия педали тормоза. Точно так же поведение водителя при ускорении также было разделено на шесть категорий: обычное нажатие педали акселератора, быстрое нажатие педали акселератора, удержание педали акселератора в нужном положении, нормальное отпускание педали акселератора, быстрое отпускание педали акселератора и отсутствие действий акселератора. педаль.Затем скорости транспортного средства были классифицированы в соответствии с диапазоном скоростей транспортного средства. Результаты распознавания поведения водителя и классифицированная скорость транспортного средства использовались в качестве входных данных модели HMM для распознавания намерений водителя относительно переднего транспортного средства. По замыслу водителя HMM подразделялись на единообразное вождение, нормальное торможение и экстренное торможение.
Мы разделили типичное поведение водителя при торможении на шесть категорий: легкое нажатие на педаль тормоза, нормальное нажатие на педаль тормоза, быстрое нажатие педали тормоза, удержание педали тормоза в нужном положении, отпускание педали тормоза и отсутствие действия педали тормоза. Точно так же поведение водителя при ускорении также было разделено на шесть категорий: обычное нажатие педали акселератора, быстрое нажатие педали акселератора, удержание педали акселератора в нужном положении, нормальное отпускание педали акселератора, быстрое отпускание педали акселератора и отсутствие действий акселератора. педаль.Затем скорости транспортного средства были классифицированы в соответствии с диапазоном скоростей транспортного средства. Результаты распознавания поведения водителя и классифицированная скорость транспортного средства использовались в качестве входных данных модели HMM для распознавания намерений водителя относительно переднего транспортного средства. По замыслу водителя HMM подразделялись на единообразное вождение, нормальное торможение и экстренное торможение. После обработки модели HMM было распознано намерение текущего водителя.
После обработки модели HMM было распознано намерение текущего водителя.
Модель нейронной сети BP использовалась в качестве классификатора поведения драйвера, и ее процесс обучения классификации состоял из прямого и обратного распространения, как показано на рисунке 3.Трехуровневая нейронная сеть BP может выполнять отображение произвольных размеров, а сложность двух типов создаваемых сетей BP одинакова, поэтому оба типа нейронных сетей BP используют единую сеть скрытого уровня. Структура состояла из одного входного слоя, одного скрытого слоя и одного выходного слоя. На рисунке 3 -1 представляют количество скрытых слоев и представляют количество нейронов во входном и выходном слоях соответственно [39].
В процессе прямого распространения данные педали передавались на входной уровень, обрабатывались слой за слоем через скрытый слой, а затем передавались на выходной уровень.Состояние нейронов в каждом слое влияет только на состояние нейронов в следующем слое, в то время как выходной слой, наконец, выводит результаты классификации поведения драйвера.
Во время обратного распространения ошибки результат выходного уровня сравнивается со значением ожидаемой классификации поведения драйвера, и возвращается ошибка в соответствии с путем исходного сетевого подключения. Затем будут изменены вес и смещение между нейронами. Следовательно, ошибку можно постепенно уменьшать до тех пор, пока она не будет ограничена заранее определенным диапазоном.
Функция активации процесса передачи этой сети использует сигмоидальную функцию, которая определяется как
. Учитывая требования времени обучения и точности обучения, алгоритм адаптивного градиентного спуска (AGD) был использован в качестве алгоритма обратного распространения ошибки сети. .
Данные, собранные с педали тормоза и педали акселератора, были взяты в качестве входных данных, а результаты классификации шести режимов торможения или ускорения были взяты в качестве выходных данных.А количество нейронов скрытого слоя рассчитывалось следующим образом: где — 20, а — 6; — любая константа от 1 до 10.
Затем, итеративное обучение было заменено другим, и было окончательно подтверждено, что количество нейронов в единственном скрытом слое двух типов нейронных сетей BP составляет 12 и 15 соответственно.
Скорость была разделена на десять уровней. Первые девять уровней соответствуют скоростям 0–10 км / ч, 10–20 км / ч,…, 80–90 км / ч, а если скорость больше 90 км / ч, это последний уровень.
Распознанное поведение водителя и классифицированная скорость транспортного средства использовались в качестве входных данных модели HMM для распознавания намерения водителя переднего транспортного средства, что может быть определено как [40] где,, и представляют результаты классификации поведения при торможении и ускорении. и скорости автомобиля соответственно.
Тогда намерение водителя HMM может быть выражено следующим образом: где мы использовали для обозначения трех намерений водителя; тогда — матрица перехода намерений водителя от к., и, соответственно, представляют собой матрицу недоразумений трех намерений водителя в отношении каждого режима торможения, режима ускорения и классификации скорости. обозначает начальный вектор вероятности намерений водителя.
Поскольку входные данные модели HMM трехмерны, итерационная формула прямых и обратных переменных в алгоритме Баума – Велча должна быть изменена следующим образом:
Формула переоценки алгоритма Баума – Велча с несколькими Матрицы вероятности наблюдения были изменены на то, что прямая переменная обозначает вероятность, когда есть частичная последовательность наблюдения, а намерение водителя соответствует времени.Обратная переменная обозначает вероятность того, что часть последовательности наблюдений находится в данный момент, а состояние представляет собой ожидание наблюдаемого значения в -м измерении последовательности наблюдений, когда таково намерение водителя. — константа, определяемая как 3.
Модифицированный алгоритм Баума-Велча использовался для обучения HMM намерения водителя, после чего можно было получить параметры HMM для движения с постоянной скоростью, нормального торможения и намерения экстренного торможения, соответственно.
2.2. Модель AEB следующего транспортного средства
Чтобы гарантировать, что следующее транспортное средство может избежать столкновения при различных намерениях водителя в переднем транспортном средстве, была создана модель AEB, основанная на трех расчетах критического тормозного пути. Кроме того, параметры движения и результаты распознавания намерений водителя, необходимые для расчета критического тормозного пути, были получены через Интернет транспортных средств.
Метод расчета критического тормозного пути предлагаемой модели AEB показан на рисунке 4.- критический тормозной путь модели AEB; — заранее определенное безопасное расстояние между двумя транспортными средствами, равное 3 м; — тормозной путь за весь процесс движения следующего транспортного средства; это тормозной путь для всего процесса переднего транспортного средства. расстояние, пройденное следующим транспортным средством при распознавании намерения переднего транспортного средства; расстояние, пройденное следующим транспортным средством за время задержки связи; — это расстояние, которое проезжает следующий автомобиль, когда педаль тормоза следующего автомобиля нажата до тех пор, пока не сработает торможение.- расстояние, пройденное при увеличении тормозного замедления следующего транспортного средства; — расстояние, проходимое следующим транспортным средством при торможении следующего транспортного средства с постоянным замедлением до той же скорости, что и переднее транспортное средство; — расстояние, пройденное передним транспортным средством, когда педаль тормоза следующего транспортного средства нажата до тех пор, пока тормоз не сработает; — расстояние, пройденное при увеличении тормозного замедления переднего транспортного средства; — расстояние, которое проходит переднее транспортное средство при торможении следующего транспортного средства при постоянном замедлении до той же скорости, что и переднее транспортное средство [41].
Критический тормозной путь модели AEB рассчитывался следующим образом: где — скорость переднего транспортного средства; — скорость следующего транспортного средства; одинаковая скорость двух транспортных средств в наиболее опасный момент; замедление следующего транспортного средства; — замедление переднего транспортного средства; время, необходимое для распознавания намерения водителя передвигаться впереди транспортного средства, определяемого как; это задержка передачи Интернета транспортных средств, и поскольку обычно используемые устройства Интернета транспортных средств на основе протокола DSRC обычно имеют задержку в несколько миллисекунд, в то время как сеть 5G, одно из будущих направлений развития Интернета транспортных средств, имеет незначительную задержку одной миллисекунды, поэтому задержка связи транспортных средств в тесте моделирования в этом документе установлена на 0; — это время, когда педаль тормоза следующего транспортного средства нажимается до тех пор, пока не вступит в силу торможение, определяемое как 0.15 с; и — время увеличения замедления тормоза транспортного средства, определяемое как 0,45 с.
В соответствии с намерением водителя переднего транспортного средства и условиями движения двух транспортных средств, параметры и в уравнениях (8) и (9) были изменены следующим образом: (i) Если два транспортных средства двигались с постоянной скорость и следующее транспортное средство было быстрее, чем переднее транспортное средство, время столкновения возникает, когда два автомобиля замедляются до той же скорости, что и переднее транспортное средство, но следующее транспортное средство все еще движется быстрее, чем переднее транспортное средство.Затем параметры и были рассчитаны следующим образом: где — максимальное замедление следующего транспортного средства, определяемое как 8 м / с 2 [42]. (Ii) Если намерение водителя переднего транспортного средства было обычным торможением и, время столкновения происходит, когда два автомобиля замедляются до одинаковой скорости, но следующее транспортное средство все еще движется быстрее, чем переднее транспортное средство. Предположим, что та же самая скорость транспортного средства, которая определяется как Тогда, параметры и были рассчитаны следующим образом: Если, время столкновения происходит, когда оба транспортных средства замедляются до остановки, то есть, и расстояние, пройденное следующим транспортным средством, равно больше, чем у переднего автомобиля.Затем параметры и были рассчитаны следующим образом: (iii) Если намерением водителя переднего транспортного средства было экстренное торможение и, время столкновения наступает, когда два транспортных средства замедляются до одинаковой скорости, но следующее транспортное средство все еще движется быстрее, чем переднего транспортного средства, а затем также принимается одинаковая скорость двух транспортных средств как, которая определяется как где — максимальное замедление переднего транспортного средства, определяемое как 6 м / с 2 .
Затем параметры и были рассчитаны следующим образом:
Если, время столкновения происходит, когда оба автомобиля замедляются до остановки, и расстояние, пройденное следующим транспортным средством, больше, чем расстояние переднего транспортного средства.
Затем параметры и были рассчитаны следующим образом:
Таким образом, если относительное расстояние между двумя транспортными средствами меньше или равно, предлагаемая модель AEB следующего транспортного средства будет обеспечивать автоматическое торможение.
3. Эксперимент с моделированием
Для проверки точности распознавания намерения водителя относительно переднего транспортного средства и эффективности предложенной модели AEB были проведены имитационное испытание намерения водителя переднего транспортного средства и испытание имитационного моделирования характеристик модели AEB, соответственно.
Как показано на рисунке 5, два имитационных теста были выполнены в среде симуляции Simulink и PreScan, а предложенная модель BP-HMM и модель AEB были созданы в Simulink. На рисунке 6 показан сценарий моделирования. На рисунке 6 (а) показан сбор данных для обучения и сценарий тестирования предлагаемой модели BP-HMM для передней машины. На рисунке 6 (b) показан сценарий тестирования производительности традиционной модели AEB. На рисунке 6 (c) показан предлагаемый сценарий тестирования производительности AEB.
Построена трехполосная дорога с односторонним движением, протяженностью 1 км и шириной 3.5 м для каждой полосы в PreScan. Затем в динамических моделях автомобилей использовался 2D Simple. Следующей моделью был BMW X5, а передним — BMW Z3. Основные параметры моделей приведены в таблице 1. Водители-испытатели использовали симулятор G29 для управления транспортным средством (рисунки 5 и 6) в реальном времени. Два датчика TIS в следующем автомобиле использовались для определения относительного расстояния между двумя автомобилями. Модуль Интернета транспортных средств использовал датчик V2X, включая приемник и передатчик, который в основном использовался для отправки результатов распознавания намерений водителя и других данных о движении переднего транспортного средства в модуль AEB следующего транспортного средства (рис. 5).
| ||||||||||||||||||||||||||||||||||||
3.1. Сбор данных для модели намерения водителя
В тесте имитации намерения водителя в качестве тестеров были наняты пять опытных водителей мужского пола и пять опытных женщин. Каждый водитель использовал симулятор G29, чтобы управлять автомобилем и двигаться по прямой (рис. 6 (а)). В соответствии с индивидуальными привычками вождения водитель смоделировал равномерное вождение, нормальное торможение и экстренное торможение переднего транспортного средства в трех диапазонах скоростей 0–30, 30–60 и 60–90 км / ч и повторил тест 20 раз. в каждом состоянии.Затем было собрано 1800 групп данных, включая смещение педали тормоза, скорость педали тормоза, смещение педали акселератора, скорость педали акселератора и скорость автомобиля. Каждый водитель знал свое намерение во время операции и может сопоставить его с данными после теста, поэтому каждая группа данных может отражать намерение конкретного водителя. Мы берем каждую группу данных в качестве выборки, и эти 1800 выборок могут составить набор данных предлагаемой модели BP-HMM. Затем мы разделили 1200 выборок набора данных на обучающий набор, а оставшиеся 600 образцов — на тестовый.В обучающем наборе и тестовом наборе данные, относящиеся к трём различным намерениям водителя, составляли по одной трети каждое. Наконец, обучающий набор использовался для обучения параметров модели BP поведения каждого водителя и параметров HMM намерения каждого водителя, а набор тестов был использован для проверки точности распознавания предложенной модели BP-HMM.
3.2. Имитационный тест для AEB
Чтобы проверить эффективность предложенной модели AEB, мы выбрали четыре традиционные модели AEB в качестве объектов сравнения, а именно три из которых были основаны на безопасном расстоянии, а именно Mazda [4], Honda [5], и модели Беркли [6], а другой была модель TTC [8], основанная на столкновении во времени.
Условия испытаний в основном относятся к двум типам CCRb (торможение от автомобиля к автомобилю) и CCRm (перемещение от автомобиля к автомобилю сзади) для тестирования AEB в Европейских правилах оценки новых автомобилей (Euro-NCAP) [43]. Поскольку все транспортные средства, участвовавшие в исследовании, были движущимися транспортными средствами, CCR (от автомобиля к заднему неподвижному автомобилю) не были включены в условия испытаний.
В соответствии со стандартом тестирования Euro-NCAP мы соответствующим образом изменили условия тестирования. Сценарии испытаний показаны на рисунках 6 (b) и 6 (c).В таблице 2 перечислены условия испытаний для сравнения моделей AEB. Мы сократили интервал скорости 10 км / ч, указанный в CCRm, до 5 км / ч и увеличили максимальную испытательную скорость следующего транспортного средства до 90 км / ч, что увеличило плотность скорости теста. Затем в тесте CCRb педаль тормоза симулятора G29 использовалась для замедления. В процессе торможения водитель-испытатель разъяснил намерение торможения и провел операцию торможения в сочетании с личными привычками вождения. Наконец, плотность скорости тестового транспортного средства также была увеличена соответствующим образом.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
UDI: единообразное намерение вождения; NBI: нормальное намерение торможения; EBI: намерение экстренного торможения. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
В этом тесте 10 опытных водителей тестировались один раз для каждого условия вождения, и результаты 10 тестов в одинаковых условиях вождения обрабатывались как группа. Когда в одной и той же группе результатов было и столкновение, и успешное предотвращение столкновений, окончательный результат рассчитывался на основе среднего значения 10 тестов. Результаты других групп были усреднены для скорости столкновения или кратчайшего относительного расстояния.
4. Результаты
4.1. Результаты распознавания намерений водителя переднего транспортного средства
В таблице 3 приведено сравнение точности распознавания различных моделей распознавания намерений водителя. Однослойная модель БП имеет низкую точность распознавания обычного намерения при торможении (91,0%) и среднюю степень распознавания намерения водителя (96,0%). Однослойная модель HMM имеет самую низкую точность распознавания для равномерного намерения вождения и нормального намерения при торможении (76,5% и 81,0% соответственно), в то время как средняя скорость распознавания намерения водителя составляет всего 85.17%. Уровень точности модели BP-HMM превышает 97,0% для всех трех типов намерений водителя, 100% для единообразных намерений вождения, а средний уровень распознавания составляет 98%.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
4.2. Результаты моделирования AEB
На рис. 7 показано распределение замедления при торможении для 10 водителей при различных намерениях торможения в тесте модели AEB. На рисунке 7 (а) показаны результаты распределения замедления при торможении для пяти моделей AEB при обычном намерении водителя при торможении. На рис. 7 (b) показаны результаты распределения замедления при торможении пяти моделей AEB при намерении водителя при экстренном торможении.Как видно из рисунка 7, когда намерение водителя тормозить было нормальным, максимальное ускорение переднего транспортного средства было в основном сосредоточено между -1,5 и -3,0 м / с 2 . Когда водитель имел экстренное намерение торможения, максимальное замедление переднего транспортного средства было в основном сконцентрировано в диапазоне от –5,0 до –6,0 м / с 2 .
На рисунках 8 и 9, соответственно, показана сравнительная диаграмма наименьшего относительного расстояния между двумя автомобилями в тестах CCRm и CCRb пяти моделей AEB.Как показано на Рисунке 8, в тесте CCRm модели Mazda, по мере увеличения скорости автомобиля, кратчайшее относительное расстояние между двумя автомобилями также увеличивалось, с диапазоном от 4,48 м до 17,61 м. Характеристики моделей Honda и Berkeley были схожими, а дальность полета составляла в основном от 4 до 10 метров. Хотя модели TTC удалось избежать столкновения в диапазоне скоростей 30–65 км / ч, она не смогла избежать столкновения сзади в диапазоне 70–90 км / ч. Для предлагаемой модели AEB значение было стабильным между 1.5 м и 2,7 м.
Как показано на рисунке 9 (a), модели Honda, Berkeley и TTC не смогли избежать столкновения в диапазоне скоростей 60–90 км / ч, когда два автомобиля следовали за ними на расстоянии 40 м и водитель впереди идущего автомобиля делал аварийную остановку. Однако Mazda и предложенные модели AEB смогли успешно избежать столкновений на всех диапазонах скоростей теста. Как показано на Рисунке 9 (b), когда условия испытаний были изменены на переднее транспортное средство с нормальным намерением торможения, только модель TTC имела столкновение в диапазоне скоростей 80–90 км / ч.Когда расстояние между двумя автомобилями составляло 12 м, а переднее транспортное средство находилось на экстренном торможении, как показано на Рисунке 9 (c), модель Mazda и предлагаемая модель AEB все же успешно избежали столкновения. Кроме того, когда водитель переднего транспортного средства хотел перейти с экстренного торможения на обычное, как показано на рисунке 9 (d), все пять моделей AEB избегали столкновений. Стоит отметить, что предложенная модель AEB была стабильной между 2,63 м и 5,28 м во время теста CCRb.
На рисунке 10 показано сравнение количества успешных конфликтов, которых удалось избежать каждой моделью в сценарии тестирования CCRb.Когда столкновение произошло во время испытания, начальные скорости обоих автомобилей были относительно высокими, от 60 до 90 км / ч. Модель Mazda и предлагаемая модель AEB избегали столкновений во всех диапазонах скоростей в условиях испытаний, а модель TTC имела наименьшее количество успешных попыток предотвращения столкновений среди пяти моделей.
В тесте CCRb распределение скорости транспортного средства в случае столкновения моделей TTC, Berkeley и Honda показано на рисунке 11. Все три модели столкнулись, когда начальная скорость транспортного средства была выше 60 км / ч, а водитель имел намерение экстренного торможения (EBI).Стоит отметить, что модели TTC не удалось избежать столкновения, когда начальная скорость была выше 80 км / ч, расстояние между транспортными средствами составляло 40 м, а водитель имел нормальное намерение торможения (NBI).
5. Обсуждение
Из таблицы 2 видно, что однослойная модель HMM оказала наихудшее влияние на распознавание единообразного намерения вождения и нормального намерения торможения. Хотя модель HMM обладала сильной способностью отображать данные с временной зависимостью, она не подходила для классификации больших объемов данных.Из-за большого размера и длины входных данных одной выборки и большого количества одновременно обучаемых выборок эффект классификации был не очень хорошим. Однослойная нейронная сеть БП может использоваться для классификации больших объемов данных. Хотя общий эффект распознавания при распознавании намерения был хорошим, было легко ошибочно идентифицировать обычное намерение торможения как два других намерения. Однако модель BP-HMM имела лучший эффект распознавания с точностью 100% для единообразного намерения вождения и средней степенью распознавания 98% для каждого намерения.Результаты распознавания показывают, что комбинация нейронной сети BP и HMM может повысить точность классификации больших объемов данных.
Во время пяти испытаний модели AEB (рис. 6), хотя один и тот же водитель или разные водители каждый раз выполняли разные операции, когда у водителей было одинаковое намерение торможения, тенденция распределения замедления торможения для переднего транспортного средства была в основном одинаковой. Следовательно, при одинаковых условиях торможения можно не учитывать влияние водителей в разное время на результаты испытаний разных моделей.
Хотя модель Mazda смогла избежать столкновения в тестах CCRm и CCRb (рисунки 7 и 8), стратегия торможения была слишком консервативной, особенно на высоких скоростях, и легко создавала ненужные помехи водителю. Стратегии торможения моделей Honda и Berkeley были более агрессивными, чем у модели Mazda, и производительность двух моделей в тестах CCRm была аналогичной. В тесте CCRb две модели показали лучшие результаты, когда намерением водителя было нормальное торможение передним автомобилем.Однако в случае высокоскоростного вождения и экстренного торможения переднего транспортного средства столкновения невозможно успешно избежать, и стратегия торможения более склонна к безопасности движения на низкой скорости. В этих пяти моделях производительность модели TTC была относительно низкой; также в тестах CCRm произошла коллизия. Хотя предотвращение столкновений может быть достигнуто путем регулировки порога торможения, это приведет к тому, что модель будет более консервативной на низкой скорости. Однако предлагаемая модель AEB может не только успешно избегать столкновений при любых условиях, но также сохранять кратчайшее относительное расстояние между двумя транспортными средствами около 3 м во время торможения.В отличие от модели Mazda, она не консервативна и позволяет избежать столкновений на высокой скорости, что улучшает характеристики предотвращения столкновений и приемлемость системы AEB.
Все модели показали хорошие результаты на низких скоростях, и столкновения в основном происходили, когда следующий автомобиль двигался на высокой скорости, а передний автомобиль имел намерение притормаживать. Как показано на рисунках 9 и 10, в испытании CCRb столкновения произошли в модельных испытаниях Honda, Berkeley и TTC, когда скорость превышала 60 км / ч, особенно при экстренном торможении переднего транспортного средства.Поскольку модели AEB требуется период времени для обнаружения рисков, в течение этого периода с увеличением начальной испытательной скорости или увеличением тормозной силы переднего транспортного средства расстояние между двумя транспортными средствами относительно уменьшится, что приведет к увеличению риска. столкновения. Модель TTC представила опасные ситуации при нормальном торможении переднего транспортного средства, которые не могут хорошо отражать риск столкновения, когда транспортное средство внезапно тормозит (особенно на небольшом относительном расстоянии). Однако, когда относительная скорость между двумя транспортными средствами была высокой, характеристики предотвращения столкновений TTC будут затронуты.Хотя вышеуказанная модель не смогла избежать столкновения при некоторых условиях движения, она все же снизила скорость столкновения и потери, вызванные столкновением.
Таким образом, параметры традиционной модели представляют собой фиксированные значения, и возможность регулировки в соответствии с намерением вождения или изменением состояния переднего транспортного средства недостаточна, что применимо только к некоторым условиям движения. Однако предлагаемая модель может регулировать стратегию торможения в соответствии с намерением вождения переднего транспортного средства с большей адаптивной способностью.
6. Заключение
В этой статье мы предложили модель AEB, основанную на распознавании намерения водителя переднего транспортного средства через Интернет транспортных средств. Модель BP-HMM была предложена для распознавания намерения водителя переднего транспортного средства. Распознанное намерение водителя было передано через Интернет транспортных средств; затем была предложена модель AEB для следующего транспортного средства для расчета критического тормозного пути в различных условиях движения во избежание наезда сзади. В тесте имитации распознавания намерений водителя предложенная модель BP-HMM показала лучший результат при распознавании намерений водителя, чем предыдущие однослойные модели BP и однослойные модели HMM.Результаты моделирования AEB показали, что по сравнению с традиционной моделью AEB, предложенная модель AEB обеспечивает более эффективное торможение, чтобы избежать столкновения сзади при различных условиях испытаний, и делает систему AEB более безопасной и удобной, не вызывая торможение слишком рано или слишком поздно.
Доступность данных
Данные, использованные для подтверждения результатов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Первый автор хотел бы поблагодарить профессора Ланг Вэй из Университета Чанъань за предложения и полезные обсуждения. Эта работа была частично поддержана Национальным фондом естественных наук (грант № 51278062), Научным фондом молодежи провинции Шэньси (грант № 2017JQ6045) и Фондами фундаментальных исследований для центральных университетов (грант № 300102229112).
Как и когда использовать аварийный тормоз
Когда следует использовать аварийный тормоз? Новые и опытные водители часто не знают, как работает аварийный тормоз или как и когда им пользоваться.Тем не менее, это может повысить безопасность автомобиля, не говоря уже о сроке службы двигателя.
Как работают аварийные тормоза
Аварийный тормоз, или стояночный тормоз, как его иногда называют, работает независимо от тормозов, которыми вы нажимаете, чтобы остановить машину. Это сделано специально, чтобы у вас был доступ к альтернативной тормозной системе, если ваши основные тормоза выйдут из строя.
Ваши основные тормоза работают через высокотехнологичную гидравлическую систему и предназначены для замедления вашего автомобиля до полной остановки. Аварийный тормоз, с другой стороны, предназначен для удержания вашего автомобиля на месте.Однако, если ваши основные тормоза выходят из строя, вы можете использовать экстренный тормоз, чтобы замедлить и остановить автомобиль.
Когда использовать экстренный тормоз
Вы должны использовать аварийный тормоз каждый раз при парковке. Неважно, находитесь ли вы на холме или плоской парковке, используете ли вы автоматическую или механическую коробку передач, а также погода приятная или ненастная.
Как следует из названия, в экстренной ситуации также следует использовать аварийный тормоз. Если вы не можете остановить машину, медленно потяните вверх ручку аварийного тормоза или нажмите на педаль, чтобы полностью остановиться.
Как пользоваться аварийным тормозом
Многие водители ставят свои машины на стоянку перед тем, как включить аварийный тормоз. Это наоборот.
Правильный способ — остановить автомобиль с помощью основных тормозов, включить аварийный тормоз, а затем поставить автомобиль на стоянку перед выключением двигателя.
Если поставить автомобиль на стоянку, а затем отпустить педаль тормоза, трансмиссия удерживает автомобиль на месте. Это увеличивает его износ. Для коробки передач проще задействовать аварийный тормоз первым.
Когда вы будете готовы к отъезду, запустите двигатель, нажмите основной тормоз, отпустите аварийный тормоз и включите движение. Помните, что движение с включенным аварийным тормозом может привести к повреждению автомобиля.
Почему важны экстренные тормоза
Использование аварийного тормоза при каждой парковке придает автомобилю дополнительную устойчивость. Например, если в вашу машину попали, когда она припаркована, аварийный тормоз снижает вероятность того, что она покатится.
Включение аварийного тормоза также поддерживает его в рабочем состоянии.Неиспользуемые аварийные тормоза могут ржаветь, что снижает вероятность их правильной работы в аварийной ситуации.
Умение пользоваться стояночным тормозом важно для обеспечения вашей безопасности во время вождения. Чтобы получить дополнительные советы по безопасности, рассмотрите эти советы по вождению от Nationwide и убедитесь, что ваш автомобиль застрахован в случае аварии с правильным полисом автострахования.
Bird представляет AEB, первую автономную систему экстренного торможения Micromobility
Безопасность на транспорте — главное.
И хотя безопасность электронного самоката проявляется во многих формах, возможно, самой важной является способность аккуратно и эффективно остановить водителя.
Это логика, лежащая в основе нового AEB от Bird: первой автономной системы экстренного торможения в индустрии микромобильности. Запатентованная функция, разработанная нашей собственной командой бывших аэрокосмических и автомобильных инженеров, защищает гонщиков от возможного отказа тормозов и гарантирует, что они всегда могут остановить автомобиль.
Как работает автономное аварийное торможение Bird?
Bird AEB постоянно контролирует механические тормозные системы наших автомобилей для выявления неисправностей. Датчики ручки тормоза сообщают о своем состоянии в режиме реального времени, что является частью ведущего в отрасли диагностического пакета, который выполняет миллионы автономных проверок неисправностей в день.
В случае, если на запрос на торможение водитель отвечает отказавшим тормозом, Bird AEB автоматически активирует расширенные средства управления двигателем, чтобы мягко, но быстро остановить водителя.
«Автономное экстренное торможение сейчас является стандартом в автомобильной промышленности, но это первый случай, когда технология активной безопасности была разработана для легких электромобилей, таких как электронные скутеры», — сказал Скотт Рашфорт, директор по транспортным средствам компании Bird. «Система Bird’s AEB основана на датчиках и расширенных возможностях обнаружения неисправностей, которые можно найти только в электросамокатах Bird. Вот почему так важно, чтобы операторы микромобильности, большинство из которых по-прежнему полагаются на стандартные модели, вкладывали время и ресурсы, необходимые для проектирования и производства собственных транспортных средств.”
Самокат, у которого была задействована система AEB, немедленно отключается, делая себя недоступным для дальнейшего использования, пока член команды Bird не сможет найти и отремонтировать транспортное средство.
Эта технология активной безопасности доступна на всех электросамокатах Bird Two. Мы будем внедрять это во все новые модели скутеров, надеясь, что другие операторы быстро последуют нашему примеру.
Как я могу узнать больше о безопасности и технологиях птицеводческих транспортных средств?
Чтобы узнать больше о том, что отличает автомобили Bird от других, подпишитесь на наш блог Bird Cities или щелкните по ссылкам ниже:
Помощь при экстренном торможении | Пляжный бульвар машин
Может быть, вы покупали новую или подержанную машину на Бульваре Машин и видели, что у некоторых автомобилей есть система экстренного торможения.Большой! Но что это значит? Давайте посмотрим на ответы на часто задаваемые вопросы ниже.
Что такое система экстренного торможения?
Эта система помогает максимально эффективно использовать тормоза. Когда вы реагируете на проблему с движением впереди, вы включаете тормоза. Однако, если вы не дотянете педаль тормоза до пола, система экстренного экстренного торможения сработает и приложит силу, необходимую для полного срабатывания антиблокировочной системы тормозов, помогая вам быстро и безопасно остановиться.
Как работает система экстренного торможения?
Когда автомобиль обнаруживает, что педаль тормоза используется для внезапной остановки, ассистент экстренного торможения толкает педаль до самого пола.Держите ногу на тормозе, чтобы антиблокировочная система тормозов сработала, если это необходимо.
В начале 90-х было обнаружено, что многие люди фактически не ударяли педалью об пол даже во время панической остановки, поэтому их автомобили попадали в наезды, которых можно было избежать. Ваша тормозная система принимает во внимание прилагаемое усилие и скорость, с которой движется автомобиль, чтобы определить, действительно ли ему нужно воспользоваться экстренной помощью.
Я использовал свой ассистент экстренного торможения.Это нужно для сброса?
После срабатывания ассистента экстренного торможения вы можете заметить, что педаль тормоза не сразу вернулась в свое обычное положение. Включите двигатель, нажмите и отпустите тормоза несколько раз. Он должен вернуться в нормальное состояние по мере перераспределения тормозной жидкости по системе. Если вы попали в аварию или на вашей приборной панели загорелись предупреждающие огни, вызовите эвакуатор.
Есть ли в моей машине EBA?
Если ваша текущая поездка была построена в текущем веке, очень высока вероятность, что в ней есть какая-то версия усилителя экстренного торможения, особенно если она была произведена после 2010 года.Хотя это не регулируется федеральным правительством как требование безопасности для вашего автомобиля, все основные автомобильные марки в Америке включают это нововведение в большинство автомобилей.
Это то же самое, что и автоматическое экстренное торможение?
Учитывая, что основное внимание уделяется беспилотным автомобилям и автономным системам безопасности, вы можете подумать, что EBA является частью этих автоматических систем. Это не тот случай. Автоматическое экстренное торможение, которое часто используется на многих новых роскошных автомобилях, на самом деле использует датчики для обнаружения пешеходов, а иногда и других транспортных средств на дороге, и задействует тормоза для вас, чтобы избежать столкновения или минимизировать повреждение.Ваш ассистент экстренного торможения требует, чтобы вы в первую очередь задействовали тормоза, чтобы работать должным образом.
Если вы хотите узнать больше об аварийных и автономных тормозных системах, включенных в ваш нынешний или новый автомобиль, обратитесь к торговому представителю или менеджеру по обслуживанию в вашем любимом автосалоне на Beach Boulevard of Cars за подробным объяснением.
Автоматическое экстренное торможение — Коалиция безопасности грузовиков
Технология автоматического экстренного торможения (AEB)— это проверенная технология обеспечения безопасности на дорогах, которая может спасти бесчисленное количество жизней и предотвратить травмы.К сожалению, после многих лет изучения и успешного использования ведущими автомобильными перевозчиками эта технология все еще не востребована для коммерческих автомобилей. Поскольку население продолжает терпеть задержки с требованием легкодоступного оборудования, семьям по всей стране пришлось заплатить самую высокую цену.
Для предотвращения этих ненужных смертей и травм Национальное управление безопасности дорожного движения (НАБДД) должно обязать использовать технологию AEB на всех больших грузовиках с полной массой 10 000 фунтов и более.Хотя агентство удовлетворило петицию, поданную 19 февраля 2015 года Коалицией по безопасности грузовиков, Road Safe America, Advocates for Highway and Auto Safety, Center for Auto Safety, в октябре прошлого года, принятие мер давно назрело, и мы призываем NHTSA подготовить окончательный вариант. правило.
NHTSA оценивает, что системы AEB текущего поколения могут предотвращать более 2500 аварий в год и что системы будущего поколения могут предотвращать более 6300 аварий в год. Ежегодно полное внедрение AEB откладывается, по оценкам исследований, 166 человек умрут без надобности и еще 8000 человек получат серьезные травмы.
В исследовании, проведенном в сентябре 2018 года, NHTSA обнаружило, что системы AEB имеют дополнительные затраты для конечного пользователя в размере 70,80-316,18 долларов США.Чтобы спасти эти жизни, предотвратить травмы, сократить расходы и обеспечить целостность семей, мы призываем Конгресс немедленно обязать использовать технологию AEB во всех больших грузовиках, приняв Закон о безопасных дорогах H.R.37373. Чтобы принять участие в этих усилиях, мы приглашаем вас отправить сообщение своим сенаторам и представителю, чтобы рассказать им о преимуществах использования этой технологии в самых тяжелых транспортных средствах на наших дорогах.
Ссылки на дополнительную информацию об автоматическом экстренном торможении (AEB) в больших грузовиках: ПравительствоНациональная администрация безопасности дорожного движения (НАБДД)
Информационный бюллетень о больших грузовиках, 2017 г.
Исследование стоимости и веса системы предупреждения о лобовом столкновении и автоматического экстренного торможения для больших грузовиков
Национальный совет по безопасности на транспорте (NTSB)
Использование систем предотвращения лобовых столкновений для предотвращения и смягчения последствий сбоев на задней панели
Федеральное управление безопасности автотранспортных средств (FMCSA)
Исследования и испытания для ускорения внедрения систем автоматического экстренного торможения (AEB) в коммерческих автотранспортных средствах (CMV)
Управление транспортной безопасности (TSA)
Атаки с тараном транспортных средств: опасные ландшафты, индикаторы и меры противодействия
Федеральный регистр
Предоставление петиции для нормотворчества: Федеральный стандарт безопасности автотранспортных средств; Автоматическое экстренное торможение; NHTSA-2015-0099
Производители AEBMeritor Wabco
OnGuardACTIVE TM Система предотвращения столкновений
Система предотвращения столкновений OnGuard ™ Meritor WABCO отмечает 10-летие
Бендикс
Bendix продолжает выполнять свои обязательства по повышению безопасности дорожного движения
Bendix® Wingman® Fusion TM
Детройт (дочерняя компания Daimler)
Detroit Assurance® 5.0
AEB входит в стандартную комплектацию некоторых наиболее популярных моделей грузовиков:
Volvo VNL 760 ,
Peterbilt 579 ,
Freightliner Cascadia ,
Mack Anthem и
каждый новый грузовик International
Исследование эффективности AEBФонд безопасности дорожного движения AAA
Автоматические системы экстренного торможения: использование технологий и инженерных разработок для крупногабаритных грузовиков для повышения безопасности
Национальная ассоциация работников городского транспорта (NACTO)
Оптимизация больших транспортных средств для городских условий: ADAS
SAE International
Эффективность существующих систем предупреждения и предотвращения прямого столкновения коммерческих автомобилей
UMTRI
Shiny-side Up: передовые технологии предотвращения столкновений, которые могут снизить количество аварий тяжелых грузовиков
МедиаФорбс
Автоматическое торможение грузовиков будет отставать от автомобилей на годы
Журнал коммерческого перевозчика
Экстренное торможение в районе, где грузовые автомобили могут вести за собой 4-х колесную технику
Прицепы-кузовостроители.ком
Логистические компании, автопарки, сообщающие о значительном сокращении аварий за счет смягчения последствий столкновений, RSC, ESC
Система предотвращения столкновений Meritor Wabco повышает безопасность: исследование
Рейтер
VW увеличивает расходы на автоматизированные грузовые автомобили
Deutsche Welle
Автоматические тормоза остановили грузовик Berlin во время нападения на рождественскую ярмарку
АВТОМОБИЛЬНЫЕ МАШИНЫ.COM
Автоматическое экстренное торможение — время прайма согласно Постановлению
.